NPort 6000 Series Configuring Serial Port Operation Modes
• Do Nothing: Data in the buffer will be transmitted when the delimiter is received.
• Delimiter + 1: Data in the buffer will be transmitted after one additional byte is received following the
delimiter.
• Delimiter + 2: Data in the buffer will be transmitted after two additional bytes are received following the
delimiter.
• Strip Delimiter: Data in the buffer is first stripped of the delimiter before being transmitted.
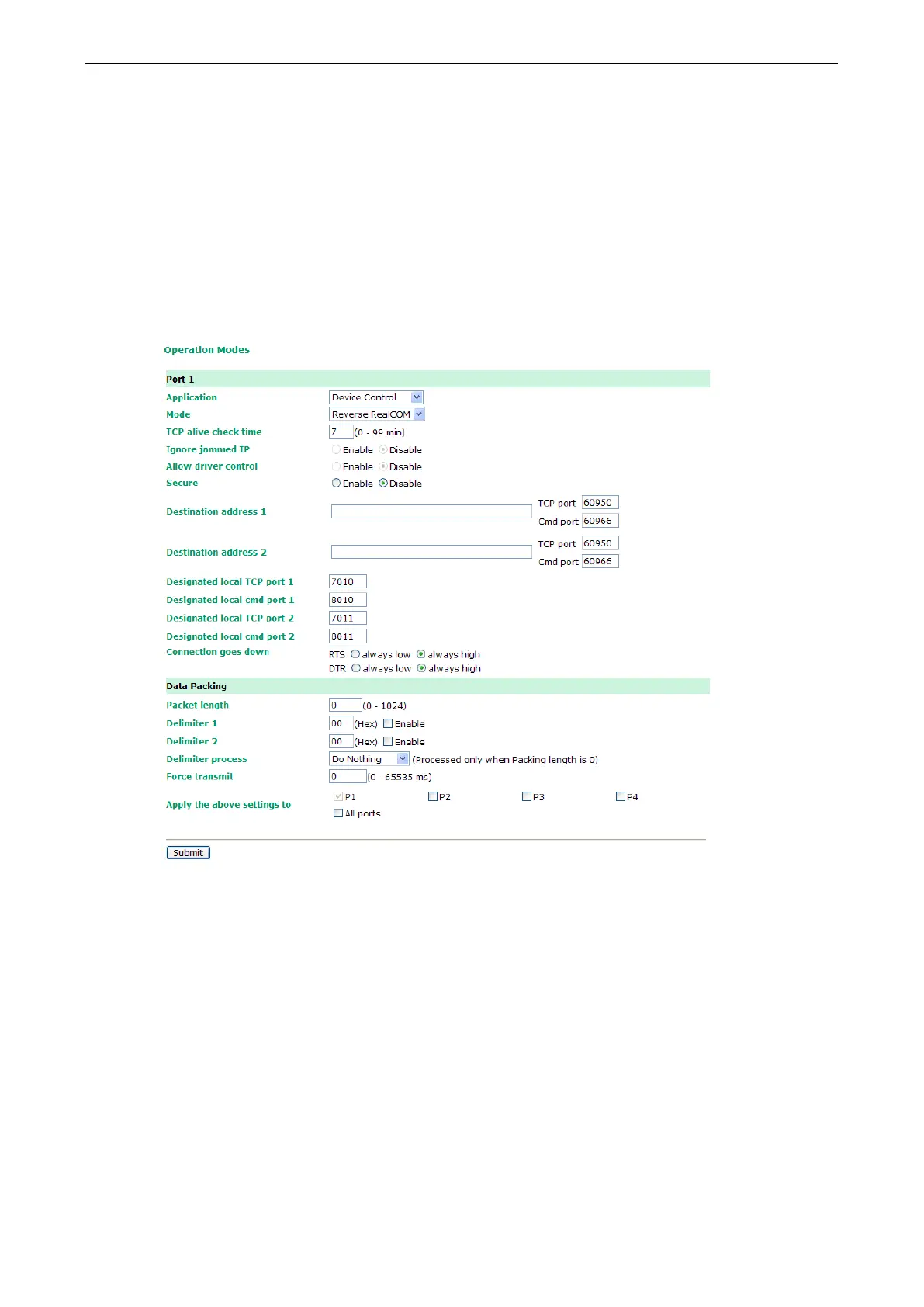
Force transmit (default=0 ms): This parameter defines how large a gap in serial communication the NPort
6000 will allow before packing the serial data in its internal buffer for network transmission.
Reverse Real COM Mode
TCP alive check time (default=7 min): This field specifies how long the NPort 6000 will wait for a response
to keep-alive packets before closing the TCP connection. The NPort 6000 checks the connection status by
sending periodic keep-alive packets. If the remote host does not respond to the packet within the time specified
in this field, the NPort 6000 will force the existing TCP connection to close. For socket and device control modes,
the NPort 6000 will listen for another TCP connection from another host after closing the connection. If TCP
alive check time is set to 0, the TCP connection will remain open and will not send any keep-alive packets.
Ignore jammed IP (default=Disable): This option determines how the NPort will proceed if multiple hosts
are connected and one or more of the hosts stops responding as the port is transmitting data. If you select
disable, the port will wait until the data has been transmitted successfully to all the hosts before transmitting
the next group of data. If you select Enable, the port will ignore the host that stopped responding and continue
data transmission to the other hosts.
Allow driver control (default=Disable): This option determines how the port will proceed if driver control
commands are received from multiple hosts that are connected to the port. If disable is selected, driver control
commands will be ignored. If Enable is selected, control commands will be accepted, with the most recent
command received taking precedence.

 Loading...
Loading...