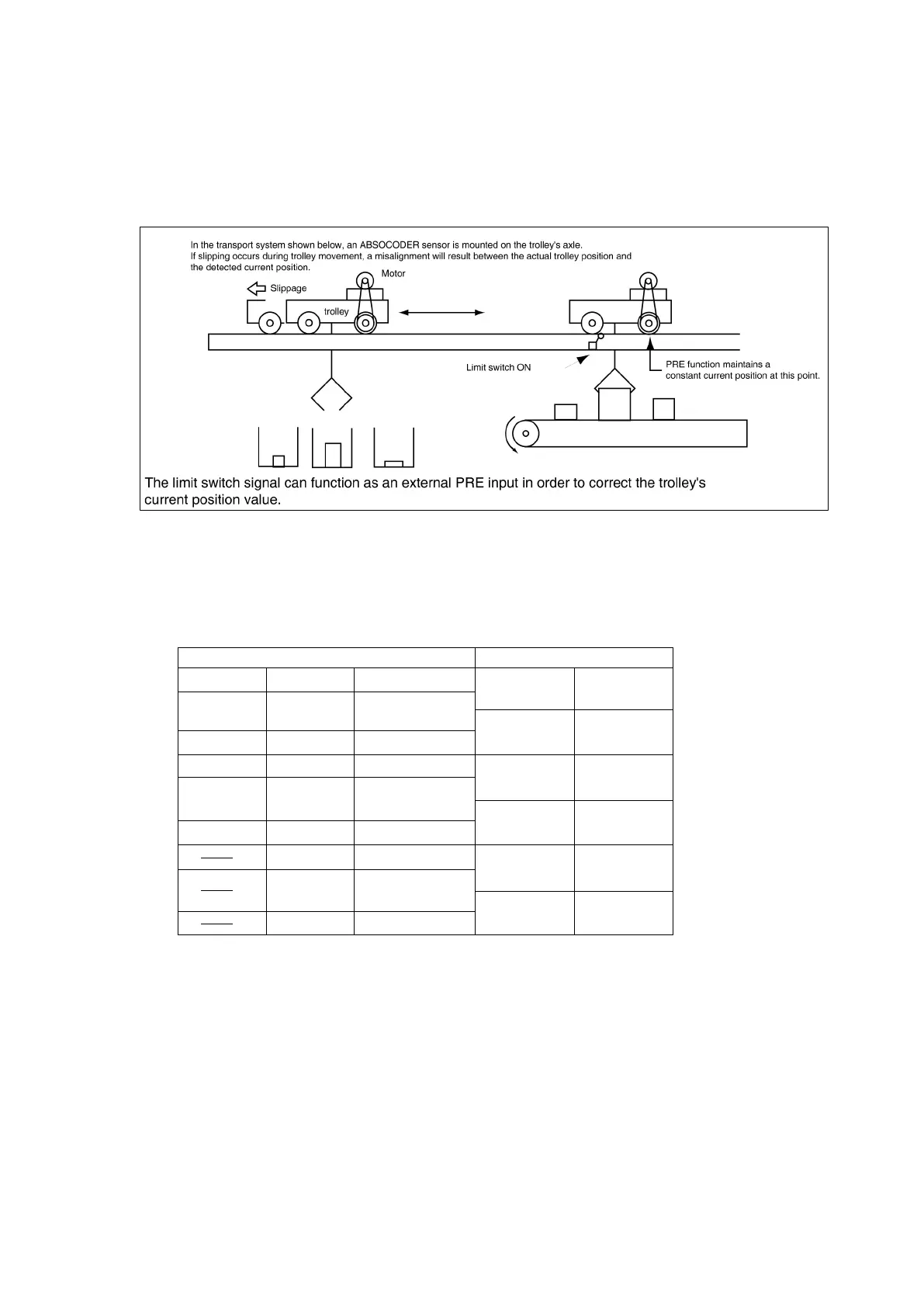
3-3. Current Position Preset Function
When this function is executed (by external input), the machine’s current position will be moved (corrected) to the
“PRE” position which has been pre-designated. The PRE function is enabled by “PRE input 1.2”.
●Application Example
The VS-12PB automatically identifies the travel direction by comparing the current position values every 100ms.
Once a “PRE” input is executed, any other “PRE” inputs within a period of 100ms will be ignored.
When a current position preset input is changed (both ON and OFF changes), subsequent preset inputs are
ignored for a period of 100ms. The CCW speeds are as shown below. Speeds of less than the shown values will
be interpreted as CW operations.
32SS 0.44 (r / min)
256PWB 0.12 mm/s
G64SP
G64SS 0.88 (r / min)
512PWB 0.23 mm/s
G128SS 1.76 (r / min)
1024PW 0.47 mm/s
G256SP
G256SS
3.52
(r / min)
512PYB 0.12 mm/s
G640SS
(r / min)
1024PYB 0.23 mm/s
G1280SS
17.60 (r
/
min)
2048PY 0.47 mm/s
G2560SS
35.20 (r / min)
3-4. Machine Position Check Function
This function checks for deviations between the actual machine position and the current position indicated by the
controller.
If “Machine position confirmation:2” is specified at the “current position preset function selection” parameter setting,
the current position is compared with the current position preset 2 value during a FORWARD or REVERSE
operation, but the current position value is not corrected in accordance with preset input 2.
Although the current position preset function actually changes the controller’s current position value, this machine
position confirmation function does not. It simply activates a self-diagnosis ( “excessive correction amount change”
detection function). Even if the machine position confirmation function is selected, the current position preset
function operates in accordance with preset input 1.
 Loading...
Loading...
