9-4. Parameter Settings
Parameter settings are used in positioning operations to determine such things as the low- speed range and the
braking timing, etc. They also determine the function settings for the various functions which are used (e.g. the
limit switch output function). Be sure to check the functions which are to be used before specifying the parameter
settings.
9-4-1. Setting Items for Dual Speed Positioning
Item Description Setting Data
selection
Designates where the target stop positions are to
be entered from.
Communication input: 1
External BCD input:
2
Learning function selection
Designates whether or not the Learning function is
to be used during AUTO positioning. A “retry”
function can also be designated together with the
ON: 1
ON + Retry:
2
Designates the positioning direction for AUTO
positioning operations.
As the VS-12PB features a unidirectional
positioning format, opposite direction positioning
is executed by first overshooting the target stop
position, then making a U-turn. This setting
designates the overshoot amount.
Note
For bidirectional positioning, designate a
Setting range: [0 to 999999]
100
Designates the zone where low-speed
positioning is to occur.
Setting range: [0 to 999999]
1000
Designate the distance between the target stop
position and the braking point for CW positioning
Setting range: [0 to 999999]
100
Designate the distance between the target stop
position and the braking point for CCW
Setting range: [0 to 999999]
100
Designate the zone which serves as the criterion
for determining whether positioning has stopped
at the target stop position.
Setting range: [0 to 999999]
100
START from STOP zone
When positioning is started from within the STOP
zone,
this setting designates how far out of the
STOP zone travel is to occur
is executed.
Note
If a setting of 0 is designated, the “
START from
STOP zone” function will be inoperative.
Setting range: [0 to 999999]
1000
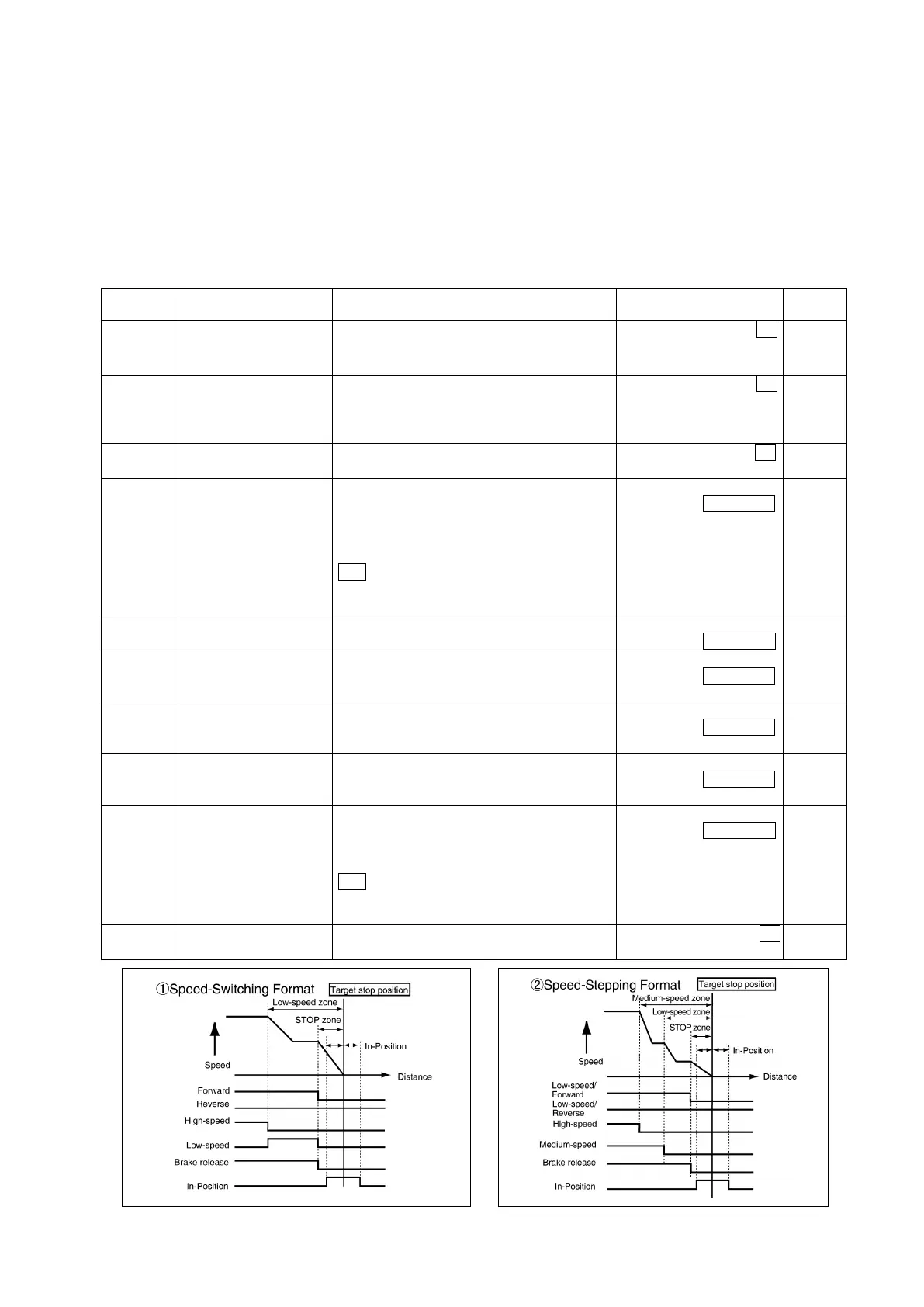
Speed control format
selection
Designates either the “speed-switching” or the
“speed stepping” format.
Speed-switching: 0
Speed-stepping: 1
 Loading...
Loading...
