3. Functions
3-1. Position Setting Function
3-1-1. Automatic Positioning Function (AUTO)
The ABSOCODER sensor detects the machine’s current position, and this position is compared with the target
position. The motor control signals are then output according to this comparison.
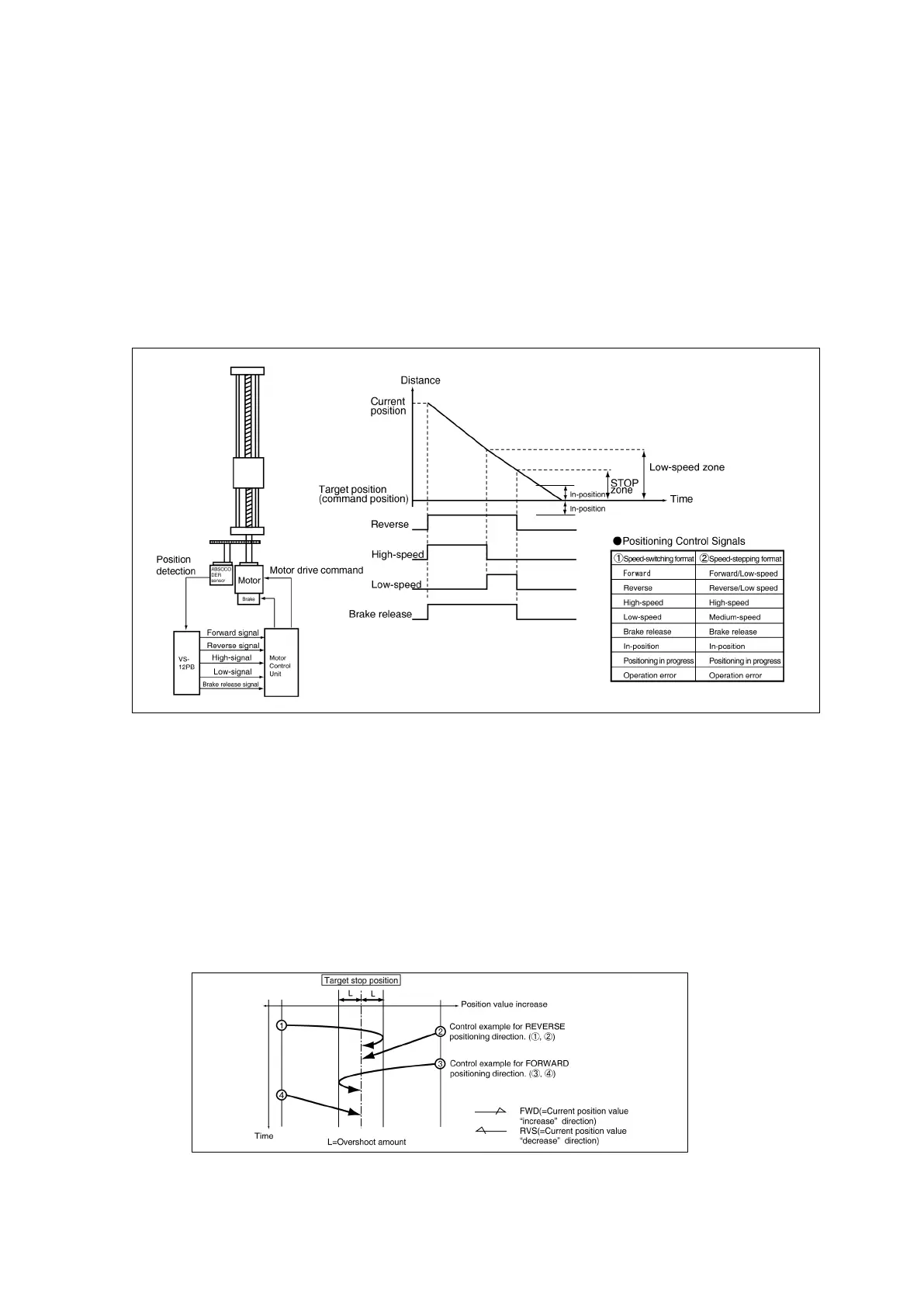
●Example of Automatic Positioning Control
3-1-2. Unidirectional Positioning
A unidirectional format is used for VS-12PB positioning in order to minimize positioning errors caused by
gear backlash, etc.
To execute positioning from the opposite direction, the target stop position must be overshot first, with
positioning then occurring from the prescribed direction after making a U-turn.
The VS-12PB automatically determines if a position overshoot is necessary, based on whether the current
position value is larger or smaller than the target stop position value, and on the parameter-designated
positioning direction (parameter No.42 : FWD or RVS). Direction designated by the parameter setting.
Note:
The overshoot amount is designated by a parameter setting.
If designated as “0”, bidirectional positioning (no overshooting) will occur.
 Loading...
Loading...
