(9) CURRENT POSITION VALUE
This value indicates where the machine is currently positioned within the machine detection range.
This can be expressed in two ways: By a sensor binary current position value, or by a scaling binary
current position value.
(a)Sensor binary current position value:
With this format, a digital output of '0' will occur (in response to the ABSOCODER sensor's input
signal) when the machine is at the 'minimum current position value' position designated at item 8
above. All subsequent machine positions are then output as values relative to that '0' point.
ABSOCODER sensor detection ranges: 0-131071 (0-1FFFF #)
(b)Scaling binary current position value:
With this format, the scaling binary value (indicating the machine's current position) is converted
into the appropriate unit (inch/mm) value. The 'minimum current position value' is then added,
with the result being expressed as a binary value:
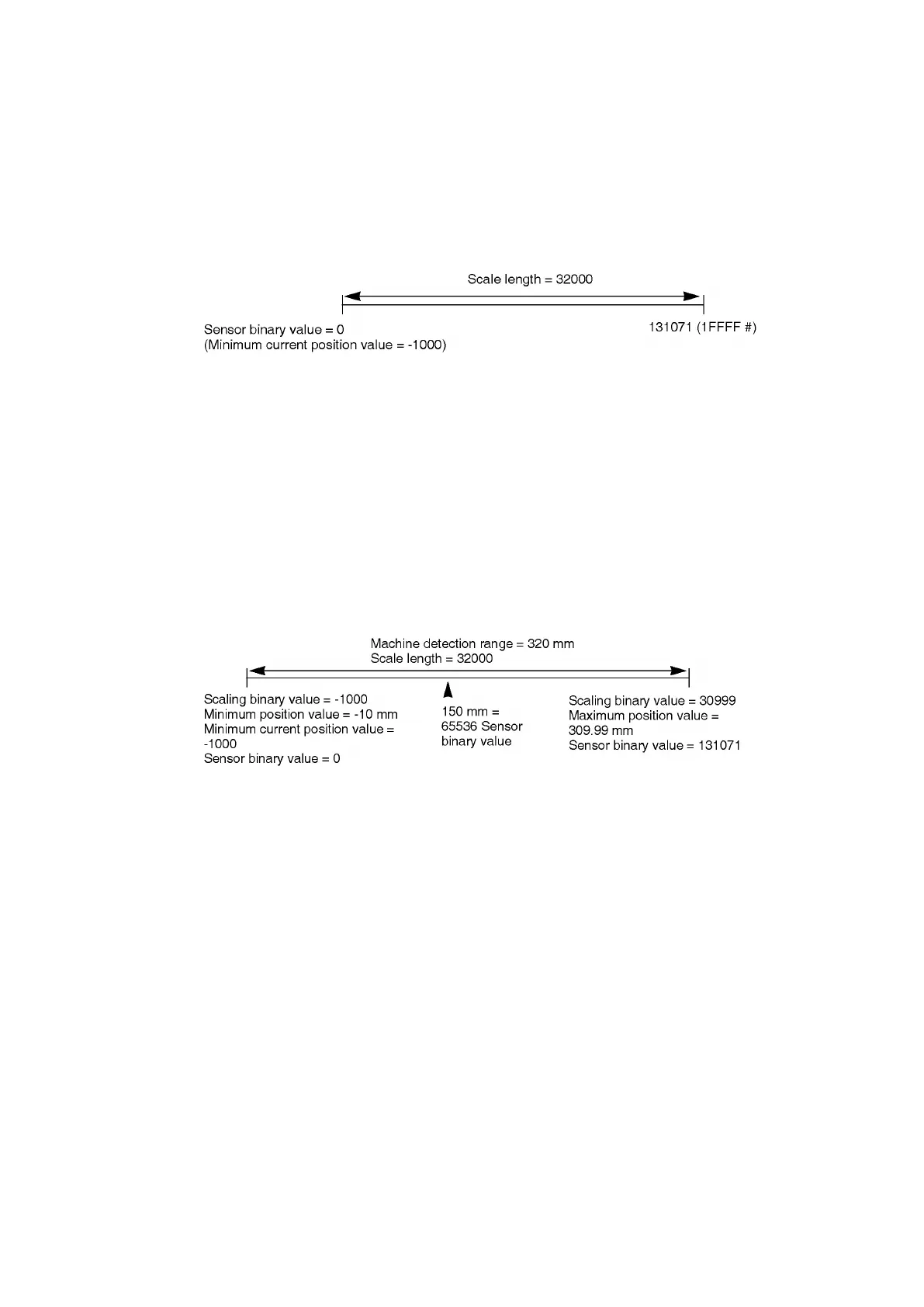
Scaling binary value = Scale length/131072×sensor binary value+ minimum current position value
Example:
With position detection executed by a 32-turn MRE sensor with a scale length of 32000, minimum
current position value of -1000, the scaling binary value will be as shown below when the
machine's actual position is at the 150 mm point:
The scaling binary value at the 150 mm position will be as follows:
32000/131072×65536 + (-1000) = 15000
(10) STOP ZONE
This is the distance between the target stop position and the point where the motor is switched OFF
(and the brake applied) when positioning is being executed. The stop zone can be designated as
desired in the PRM (parameter) mode.
(11) BRAKE RELEASE
This is the output signal which releases the brake in positioning systems where the motor is equipped
with a brake.
(12) FWD/RVS
For the VS-212DN system, the current position value increases in the FWD (forward) direction and
decreases in the RVS (reverse) direction.
(13) SIMPLE LEARNING FUNCTION
If a positional discrepancy occurs between the target position and the current position upon
completion of positioning, the discrepancy will be automatically corrected when positioning is next
carried out.