7.1.8 Operation when detection range is exceeded
The VS-212DN executes absolute position detection within the detection range. However, if this
detection range is exceeded, the current position value will immediately change by the amount of the
entire scale length.
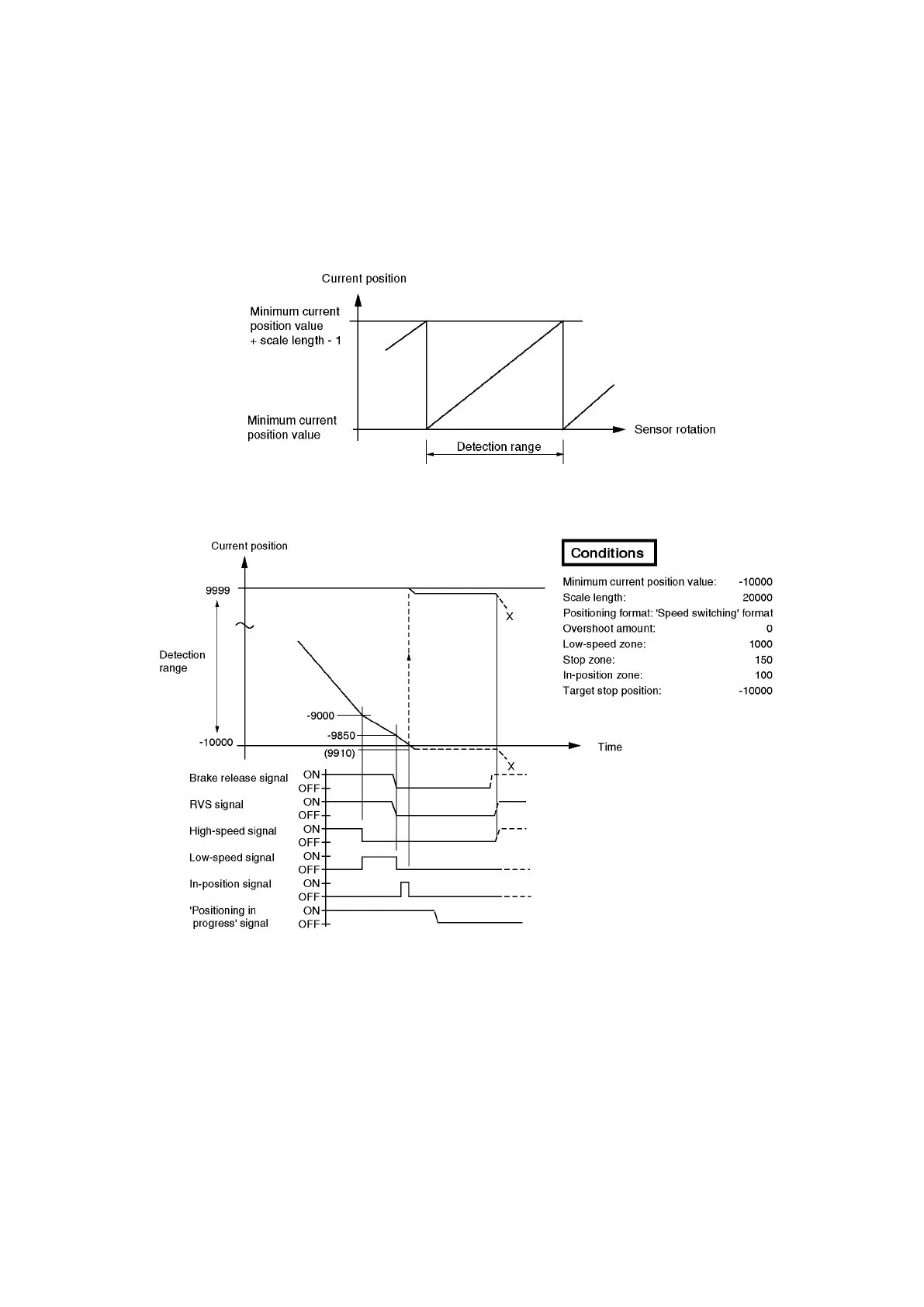
The following diagram shows the relationship between MRE sensor rotation and the current position
value. Precautions regarding a positioning operation which occurs near the limits of the detection
range are explained below.
(1) The following example shows a case in which the detection range was exceeded during a
positioning operation near the minimum current position value point.
In the above example, the stop position of –9850 is overshot by 240 during RVS positioning, with the
resulting current position of 9910 exceeding the detection range limit of –10000. Because the –10000
limit has been exceeded, the current position will be detected as 9910 even if it is still within the
In-position range of plus/minus 100, and the ‘In-position’ signal will not turn ON.
When positioning toward the target stop position is re-started from this status, reverse positioning will
occur.
When the detection range is exceeded, the JOG operation, etc., should be used to move the current
position back within the detection range prior to resuming the positioning operation.