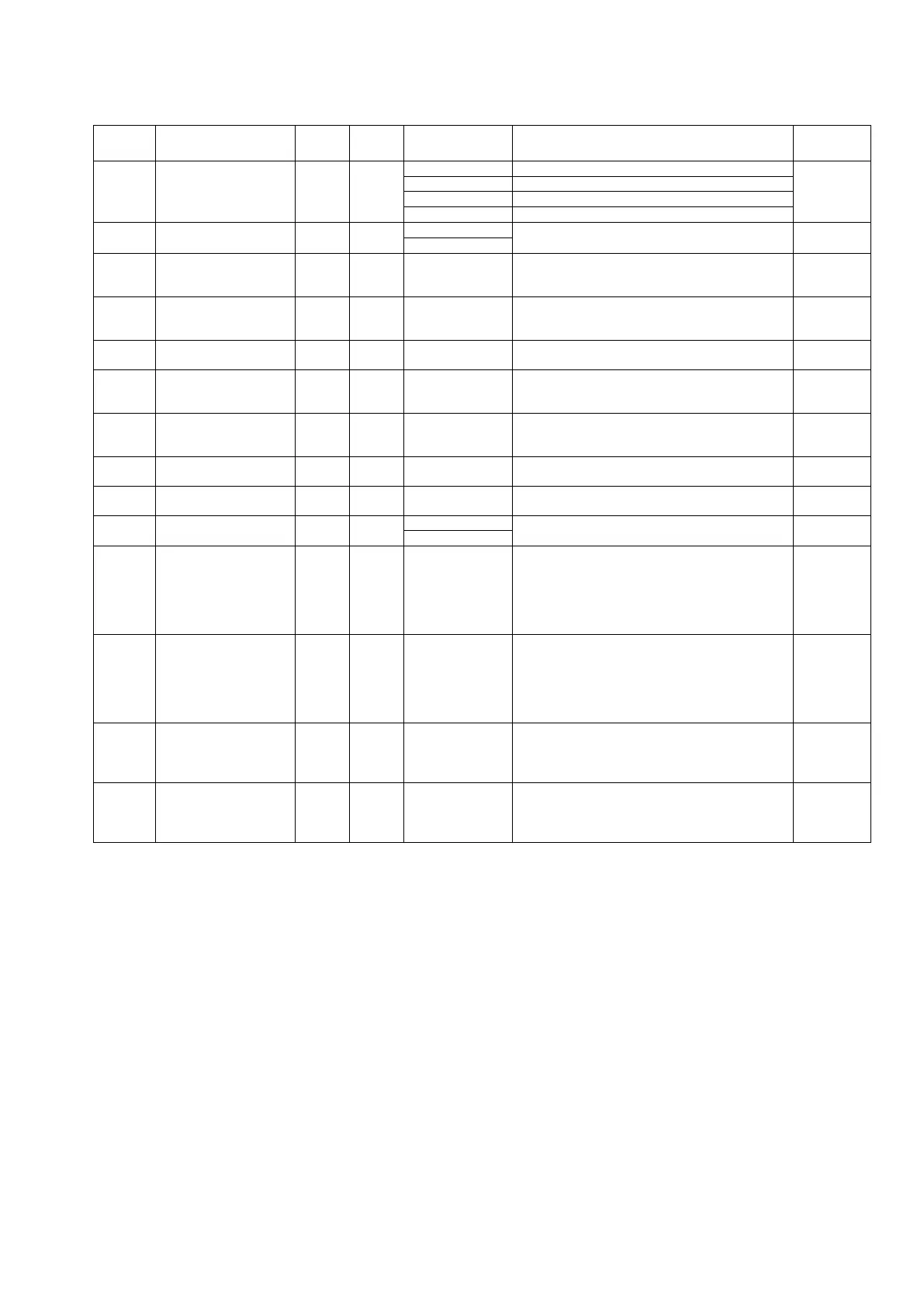
7.5 Parameter List
Name
Data range Description
12298
(12362)
Positioning format USINT 0
Speed switching format: w/o learning function
51
Speed stepping format: w/o learning function
Speed switching format with learning function
Speed stepping format with learning function
Positioning direction USINT 0
Designates whether positioning is to be executed
in the Forward or Reverse direction.
52
12300
(12364)
Overshoot amount UDINT 100 0~999999
Designates the target position overshoot amount
when positioning occurs from the opposite
direction as the prescribed positioning direction
53
12301
(12365)
Medium-speed zone
(Parameter)
UDINT 10000 0~999999
Designates the distance (prior to the target) over
which medium-
speed positioning is to occur.
(when the ‘speed stepping format’ is used.)
54
Low-speed zone
(Parameter)
UDINT 1000 0~999999
Designates the distance (prior to the target) over
which low-speed positioning is to occur.
55
12303
(12367)
Stop zone (Parameter) UDINT 100 0~999999
Designates the distance between the positioning
target position and the point where the brak
56
12304
(12368)
In-position zone
(Parameter)
UDINT 100 0~999999
Designates a reference distance (relative to the
target position) used to determine if motion is
stopped at the correct target position
57
Upper limit value DINT 999999 -99999~999999 Designates the ‘+’ direction limit value.
58
Lower limit value DINT -99999 -99999~999999 Designates the ‘-‘ direction limit value.
59
Start from stop zone USINT 1
Designates whether positioning is to occur when
the start position is already within the stop zone.
60
12308
(12372)
Motion non-detection
timer
UINT 1000 0~9999
×
0.01s]
Designates the period from the point when
positioning is started until the point when the
‘motion error’ detection function begins.
The timer
for the "no motion detected" condition operates
when the value set to’0’.
61
12309
(12373)
Motion misdirection
non-detection timer
UINT 1000 0~9999
×
0.01s]
Designates the period from the point when
positionin
g is started until the point when the
‘motion direction error’ detection function begins. .
The timer for the "no motion detected" condition
operates when the value set to’0’.
62
12310
(12374)
Positioning completed
timer
UINT 10 0~9999
×
Designate
s the delay period from the point when
positioning control ends until the point when the
‘positioning’ signal goes OFF.
63
12311
(12375)
JOG low-speed timer UINT 9999 0~9999
×
Designates the low-
speed operation period for
the JOG operation. . The JOG
speed is fixed at
low-speed when the value is set to ’9999’.
64
7.5.1 Selection of positioning format (I/O address: 12298 [12362])
The VS-212DN features two positioning formats
The ‘speed switching’ and ‘speed stepping’ formats. The positioning format selection is designated at
parameter as follows:
0: Speed switching format without learning function
1: Speed stepping format without learning function
2: Speed switching format with learning function
3: Speed stepping format with learning function