7. Positioning Function
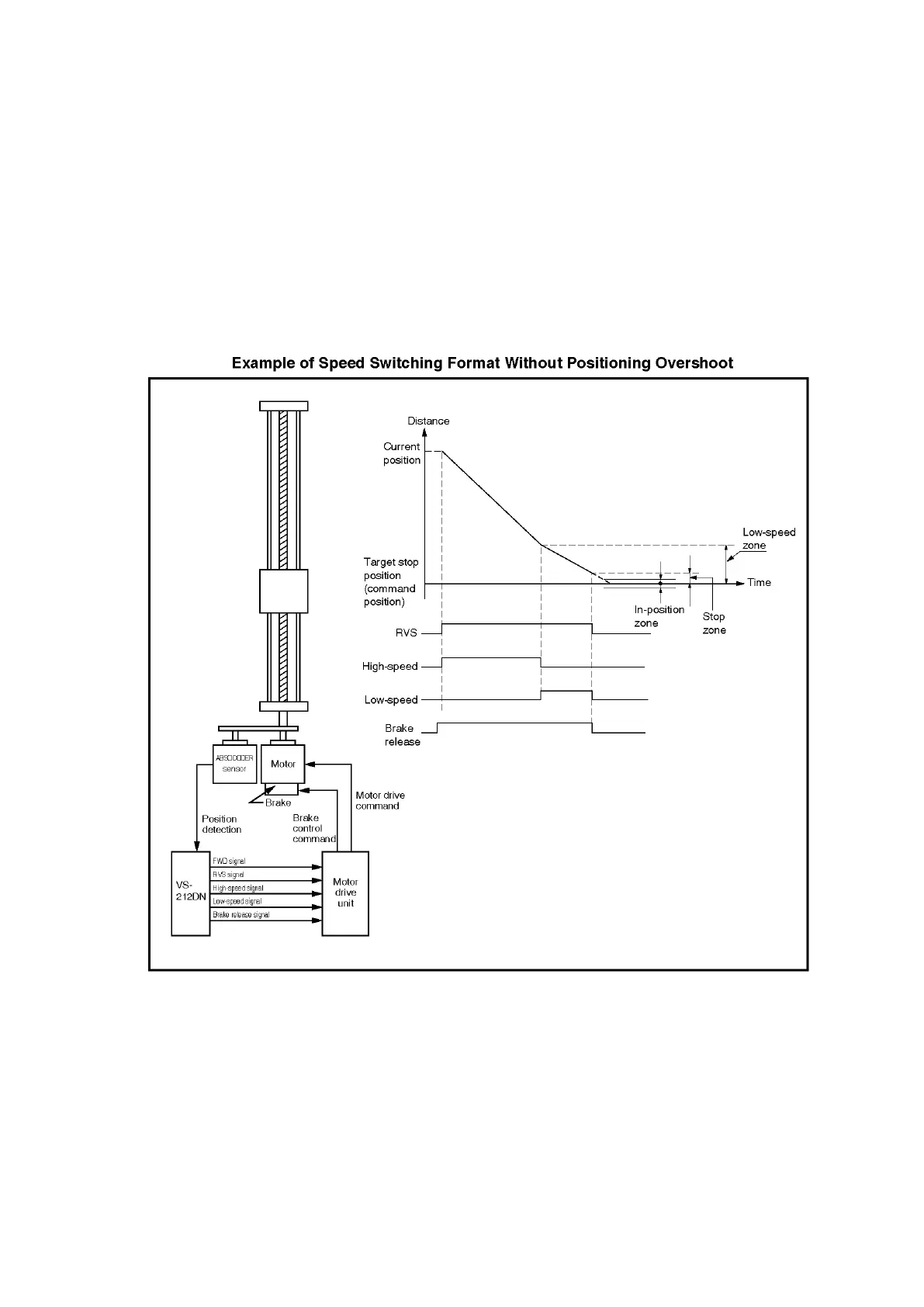
The positioning function consists of an operation in which the ABSOCODER sensor detects the
machine’s current position value and compares that value with the pre-designated speed-change data,
and target position data, etc., and then outputs the appropriate motor control signals in order to move
the machine to the designated the target STOP position.
The positioning range is the range in which the ABSOCODER sensor can execute absolute position
detection. The machine travel range must be within the absolute position detection range.
Positioning will begin when the START input occurs, after the low-speed zone, stop zone, In-position
zone, and medium-speed zone (if required) parameter or buffer memory settings have been made, and
after the target stop position has been written to the buffer memory by the sequence program.