75
Setting Control Specifications Section 4-3
Note Set the limits so that the MV Upper Limit > MV Lower Limit.
If the MV Lower Limit > MV Upper Limit, the larger value will function as the
MV Upper Limit.
4-3-8 Tuning
Autotuning (AT) When autotuning (AT) is executed, the MV is forcibly changed, the control
subject's characteristics are observed (with the limit cycle method), and the
best PID constants are automatically set for the SP during execution.
• Autotuning cannot be executed while control is stopped, during manual
mode operation, or during ON/OFF control.
• Use an operation command to execute autotuning. For details, refer to 6-
4-11 Operation Commands.
• The only parameters that can be received during autotuning are RUN/
STOP, Auto/Manual, AT Execute/Cancel, Alarm 1/2/3 Latch Cancel, and
Alarm Latch Cancel All. Other parameters cannot be changed.
• If the STOP parameter is set during autotuning, autotuning will be can-
celled and operation will stop. Autotuning will not be restarted even if RUN
is set again.
• Normally the following parameters are left at their default settings.
Note (1) This parameter can be set only when operation is stopped.
(2) The decimal point position is determined by the sensor selection. With
analog inputs, the decimal point position is determined by the Decimal
Point Position parameter setting. In this case, however, the 0 (****) deci-
mal point position setting will be treated as setting 1 (***.*).
Variable type Parameter name Setting range Default
D5/95
MV Upper Limit (Channel) −5.0 to 105.0 (for standard control)
0.0 to 105.0 (for heating/cooling control) %
105.0
MV Lower Limit (Channel) −5.0 to 105.0 (for standard control)
−105.0 to 0.0 (for heating/cooling control) %
−105.0
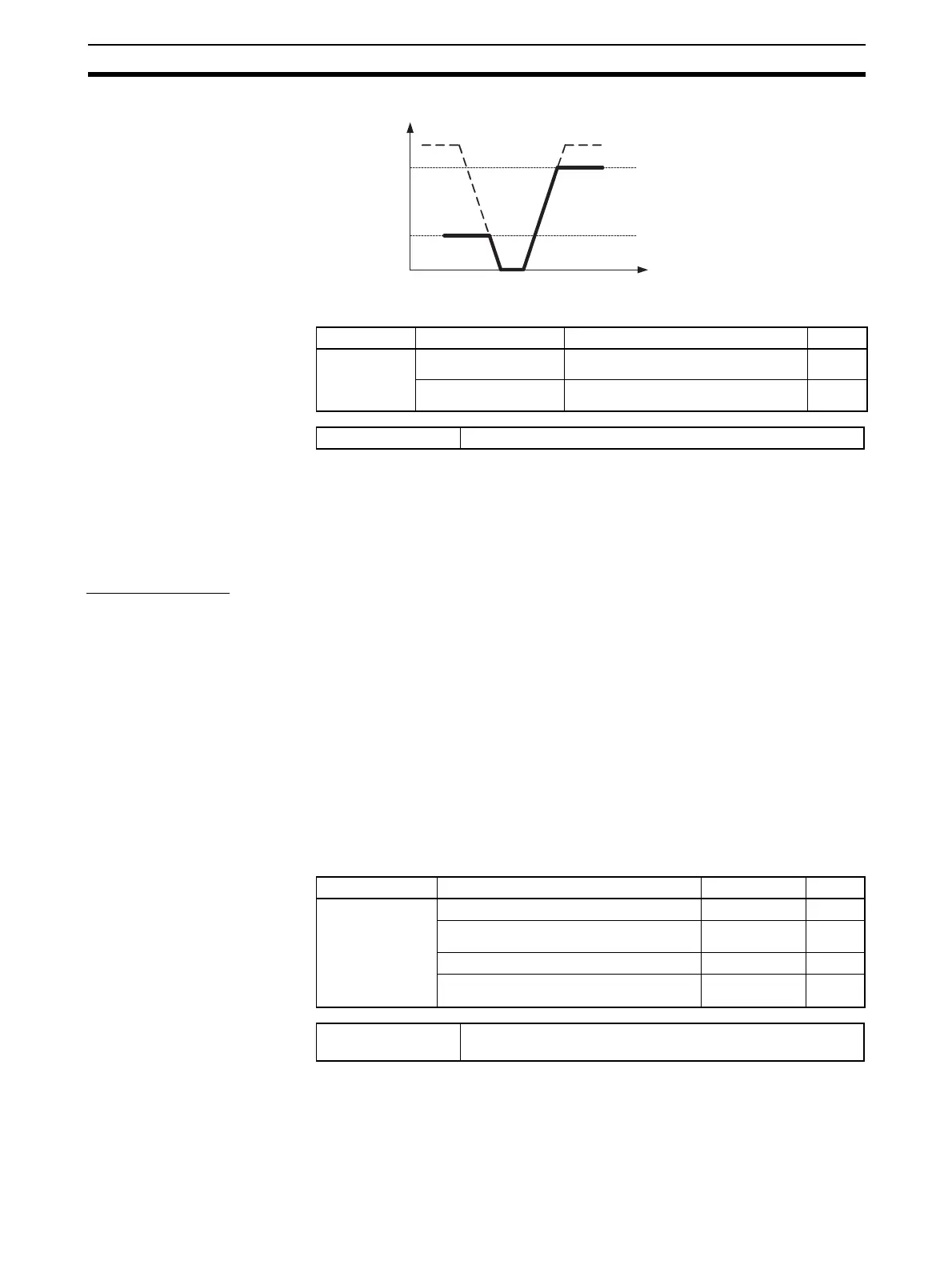
Conditions for use The control method must be set to 2-PID control.
Output
Heating
MV
MV Upper Limit
MV Lower Limit
Cooling
MV
Output Mode Selection = Heating/cooling control
Variable type Parameter name Setting range Default
E5/A5
AT Calculated Gain (Common) 0.1 to 10.0
0.8
AT Hysteresis (Channel) 1 to 9999 EU
(See note 2.)
8
Limit Cycle MV Amplitude (Common) 5.0 to 50.0 %
20.0
Temporary AT Execution Judgment Deviation
(Channel)
0 to 9999 EU
(See note 2.)
1500
Conditions for use The control method must be set to standard control and 2-PID
control.