77
Setting Control Specifications Section 4-3
RT (Robust Tuning) When autotuning is executed with RT selected, PID constants are automati-
cally set that make it hard for control performance to degenerate even when
control object's characteristics change.
• Selecting the RT mode in the following cases will help to prevent hunting
from occurring.
• When the set temperature is not fixed and is changed in a wide range
• When there are large variations in ambient temperatures due to factors
such as seasonal changes or differences between day and night tem-
peratures
• When there are large variations in ambient wind conditions and air flow
• When heater characteristics change depending on the temperature
• When an actuator with disproportional I/O, such as a phase-control-
type power regulator, is used
• When a rapidly heating heater is used
• When the control object or sensor has a long dead time
• When hunting occurs in normal mode for any reason
• Even when hunting occurs for PID constants when autotuning is executed
in normal mode, it is less likely to occur when autotuning is executed in
RT mode.
• When the temperature (PV) falls short of the set point for the PID con-
stants when using autotuning in normal mode, executing autotuning in RT
mode tends to improve performance.
• When the manipulated variable (MV) is saturated, the amount of over-
shooting may be somewhat higher in comparison to PID control based on
autotuning in normal mode.
Switching to and from RT
Note This parameter can be set only when operation is stopped.
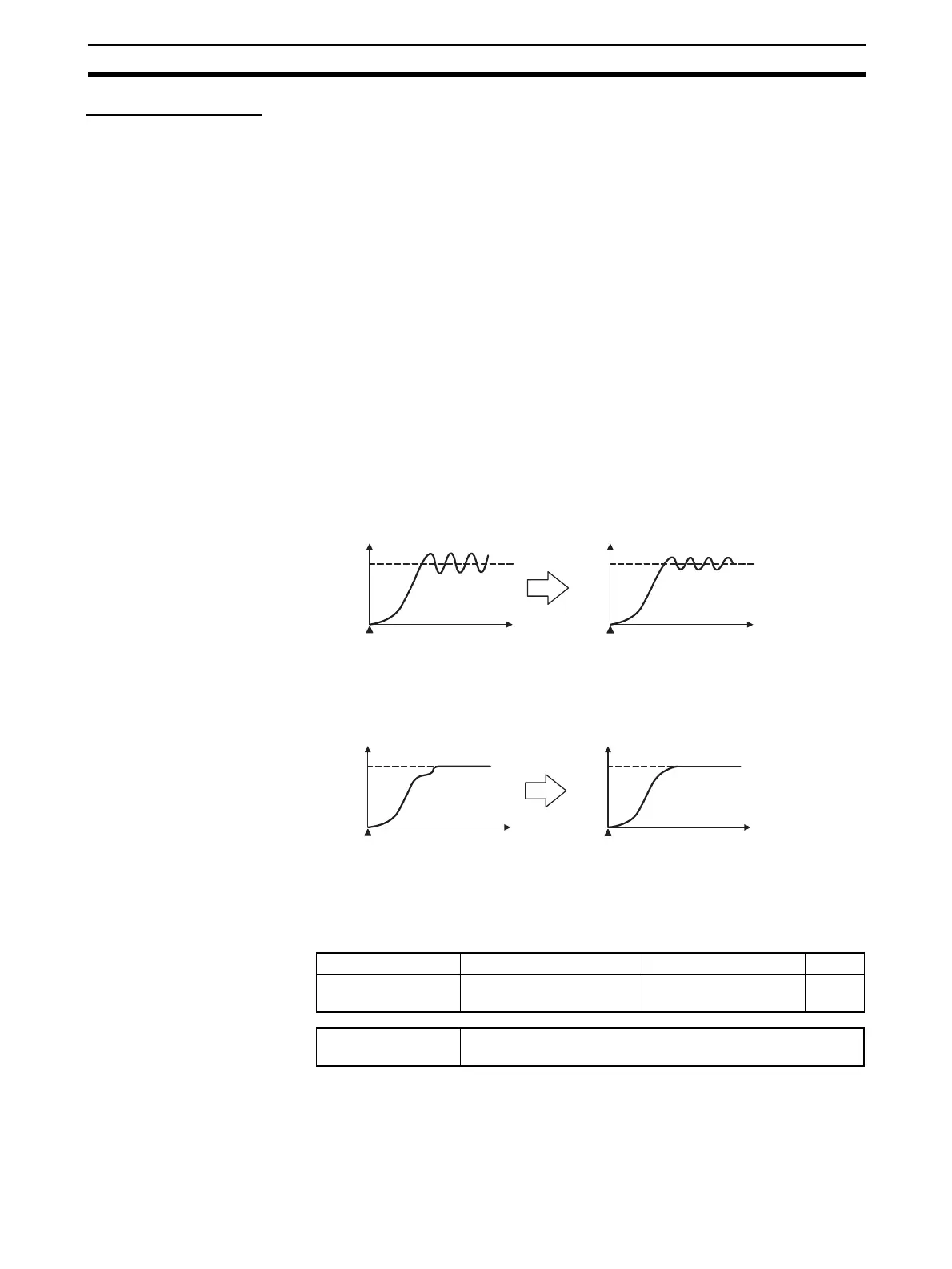
Time
Set value
Start of control
Temperature
Much hunting occurs.
Time
Set value
Start of control
Temperature
Hunting is reduced.
Time
Set value
Start of control
Temperature
Time
Set value
Start of control
Temperature
Variable type Parameter name Setting range Default
E5/A5 RT (Channel) 0: Disabled
1: Enabled
0
Conditions for use The control method must be set to 2-PID control and the input
type must be a temperature input.