90
Setting Inspection Conditions
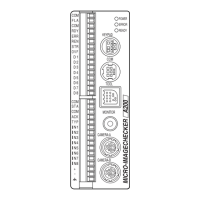
Feature Extraction
Position detection, Angle detection, Counting
Binarizes an image captured by a camera and detects
a specified size of clusters of white or black pixels and
judges as OK or NG depending on the measured
number. Outputs the feature quantity such as the
coordinates of a center of gravity or principal axis
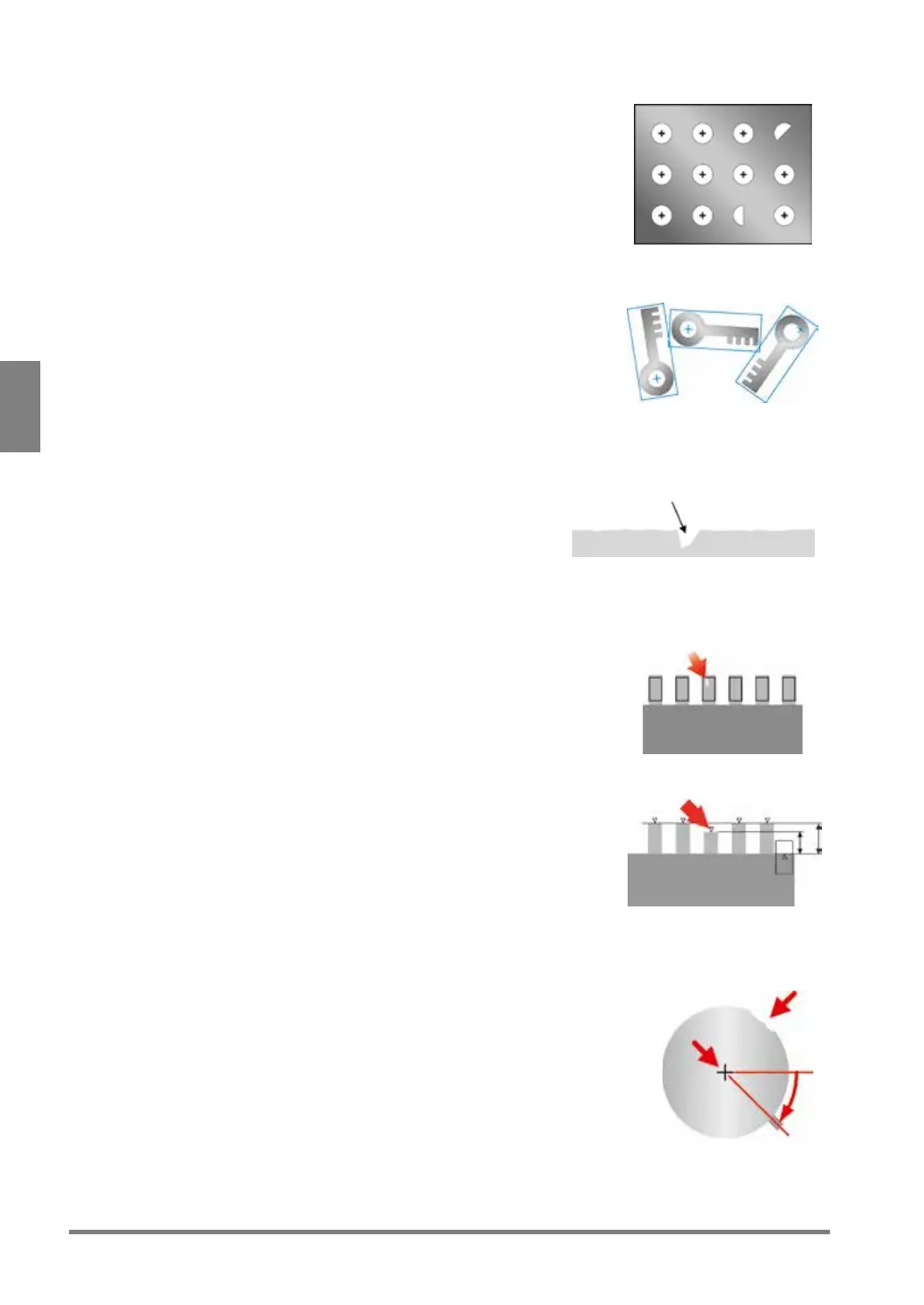
Smart Matching
Position detection, Angle detection, Type recognition
Smart Matching searches and detects a similar part to
the registered image pattern.
Outputs the detected position and angle, and similarity
degree or correlation value. Scans with a gray image.
Flaw detection
Flaw detection, Detection of a flaw, missing
edge, burr on the surface, Detection of a dirt
Calculates gray average value within the
segmented area (cell) in a line, arc and circle
or rectangular area. If the PV500 detects an
area more than a certain level of difference in
average gray, the device judges it as a flaw.
Connector (Binary Window, Gray Window)
Appearance inspection of lead pins
Inspects appearance of many pins using the method of
Binary Window or Gray Window checker.
Connector (Gray Edge)
Measurement of pitch of lead pins, float check,
Connector gap, Width measurement
Using the edge detecting principle of Gray Edge,
Connector (Gray Edge) measures pitches of many
pins, detects floats, and measures gaps of a
connector. It has also Detect Mode which inspects
width or height of parts, using many edges.
Smart Edge (Circle) Available from Ver.1.6
Detection of the center point of round object, detection of
a missing edge, burr on the surface, detection of the
position or angle of projection, circularity inspection
Detects the radius or diameter of a round object based on
the coordinate value of the edge of the object detected by
setting a number of cells.
A ring-shaped object or circular object can be inspected.
 Loading...
Loading...