Parameters
4.2 Motor control
SIMOCODE pro - Parameterize
Operating Manual, 04/2017, A5E40507630002A/RS-AA/001
99
You will find detailed explanations of the settings in Chapter Application selection, settings
and definitions of control functions (Page 66).
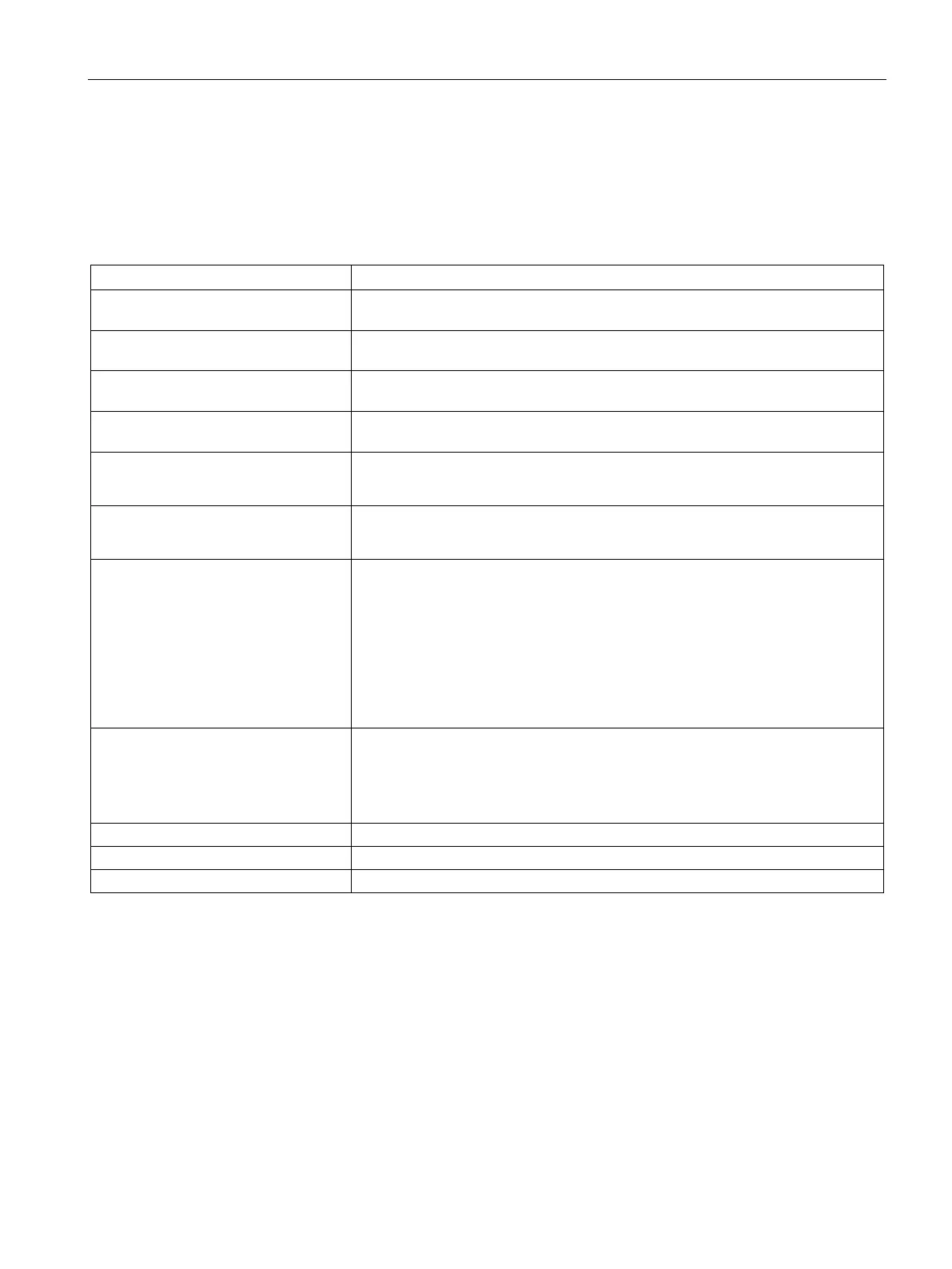
Table 4- 18 Pole-changing starter settings
OFF Control command OFF (connection with any socket, usually with "Enabled control
ОN > Control command ON > (SLOW) (connection with any socket, usually with
"Enabled control command - ON >" socket)
ON >> Control command ON >> (FAST) (connection with any socket, usually with
"Enabled control command - ON >>" socket)
FB ON Auxiliary control input "Feedback ON" (connection with any socket, usually with
"Status - current flowing" socket)
Non-maintained command mode
• Deactivated (default setting)
• Activated
Saving change-over command
• Deactivated (default setting)
• Activated
Separate fail-safe function from control
function
• Deactivated (default setting): A safety-related tripping by the DM-F modules
also affects the SIMOCODE pro control function, avoiding additional follow-on
fault messages. This setting is selected for applications where safety-related
tripping directly affects the motor controlled by SIMOCODE pro.
• Activated: A safety-related tripping by the DM-F modules does not affect the
SIMOCODE pro control function. This setting is selected for applications
where safety-related tripping does not affect the motor controlled by
SIMOCODE pro.
Load type You can choose between:
• Motor (default)
• Resistive load (see Chapter Application selection, settings and definitions of
control functions (Page 66))
Range 0 to 25.5 s (default: 0.5 s)
Range 0 to 6553.5 s (default: 1.0 s)
Range 0 to 655.3 s (10 ms steps) (default: 0.00 s)