STOBER 12 | Diagnostics
05/2019 | ID 442790.01
167
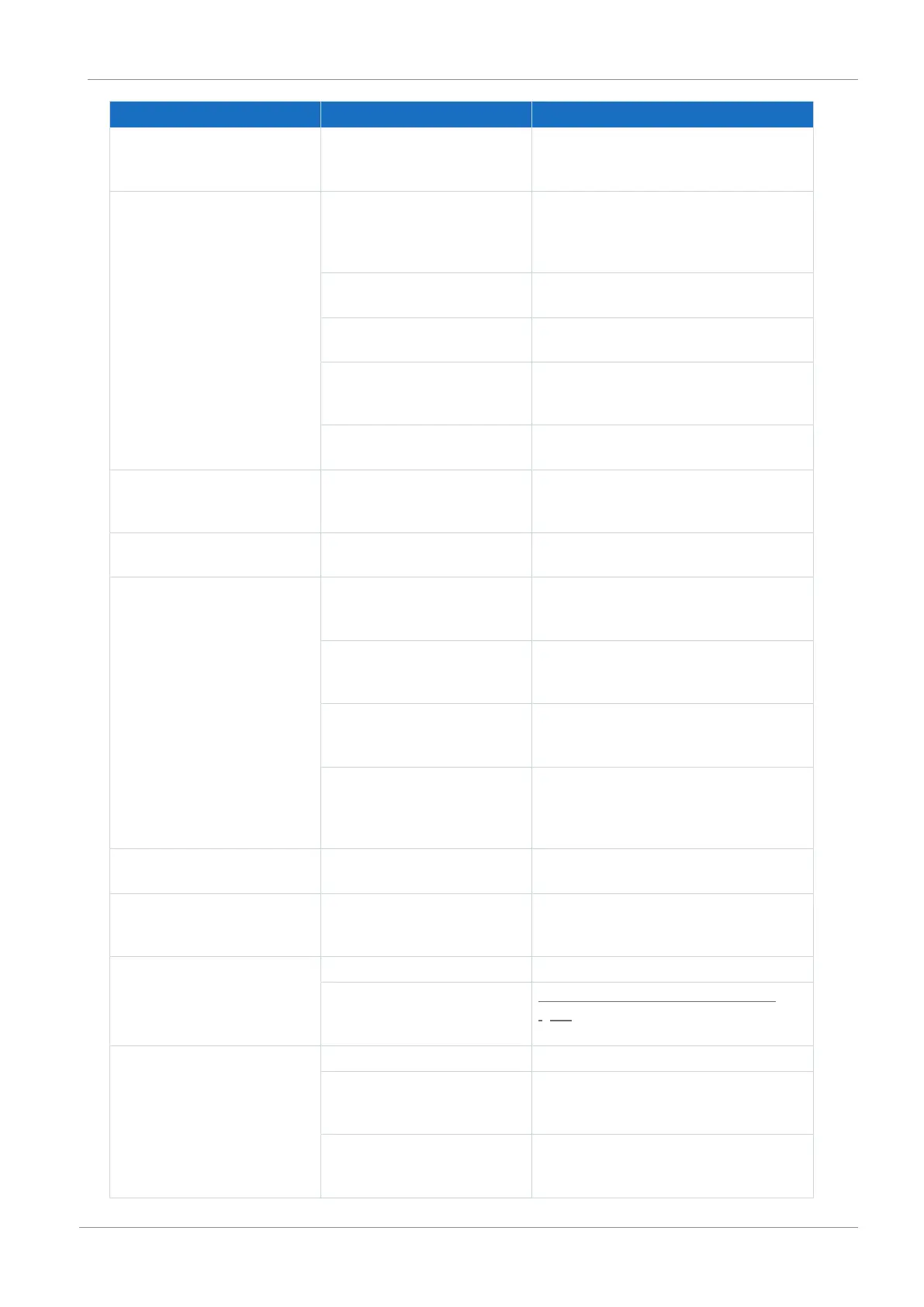
Number Cause Check and action
1: Parameter <-> encoder Inconsistent parameterization Compare the specification of the connected
encoder to the corresponding values of the H
parameters and correct them if necessary
2: X4 speed Exceeded encoder maximum
velocity
Check the actual velocity during a movement
using the scope image (E15) and adjust the
permitted encoder maximum velocity if
necessary (B297)
Connection error Check the connection and shielding and correct
them if necessary
Dynamic set values for the Lean
motor
Check the dynamics of the application set
values and reduce them if necessary
Dynamic control of the Lean motor Check the control settings; if necessary, reduce
the gain (C31, I20) and increase the adjustment
times (C32)
Toggling the Lean motor position
determination models
Check the switchover filter time constant and
increase it if necessary (B137)
6: X4 EnDat encoder found Inconsistent parameterization Compare the connected encoder to the
parameterized encoder and correct it if
necessary (H00)
7: X4 channel A/incremental Connection error Check the connection and correct it if
necessary
8: X4 no encoder found Connection error Check the connection and correct it if
necessary; restart the drive controller to switch
the encoder supply back on
Defective encoder cable Check the cable and replace it if necessary;
restart the drive controller to switch the
encoder supply back on
Defective power supply Check the encoder power supply and correct it
if necessary; restart the drive controller to
switch the encoder supply back on
Inconsistent parameterization Compare the connected encoder to the
parameterized encoder and correct it if
necessary (H00); restart the drive controller to
switch encoder supply back on
9: Reference failed Reference set for inactive Lean
motor position determination
Check device status (E48) and, if necessary,
activate the enable signal
10: X4 channel A/Clk
–
11: X4 channel B/Dat
Defective encoder cable Check the cable and replace it if necessary
14: X4 EnDat CRC
–
15: X4 double transmission
Connection error Check the connection and correct it if necessary
Electromagnetic interference Take EMC recommendations into account
[}78] and, if necessary, increase the fault
tolerance (I298)
16: X4 busy Defective encoder cable Check the cable and replace it if necessary
Inconsistent parameterization Compare the connected encoder to the
parameterized encoder and correct it if
necessary (H00)
Incompatible encoder Compare the specification of the encoder with
the corresponding specifications from STOBER
and replace the encoder or motor if necessary