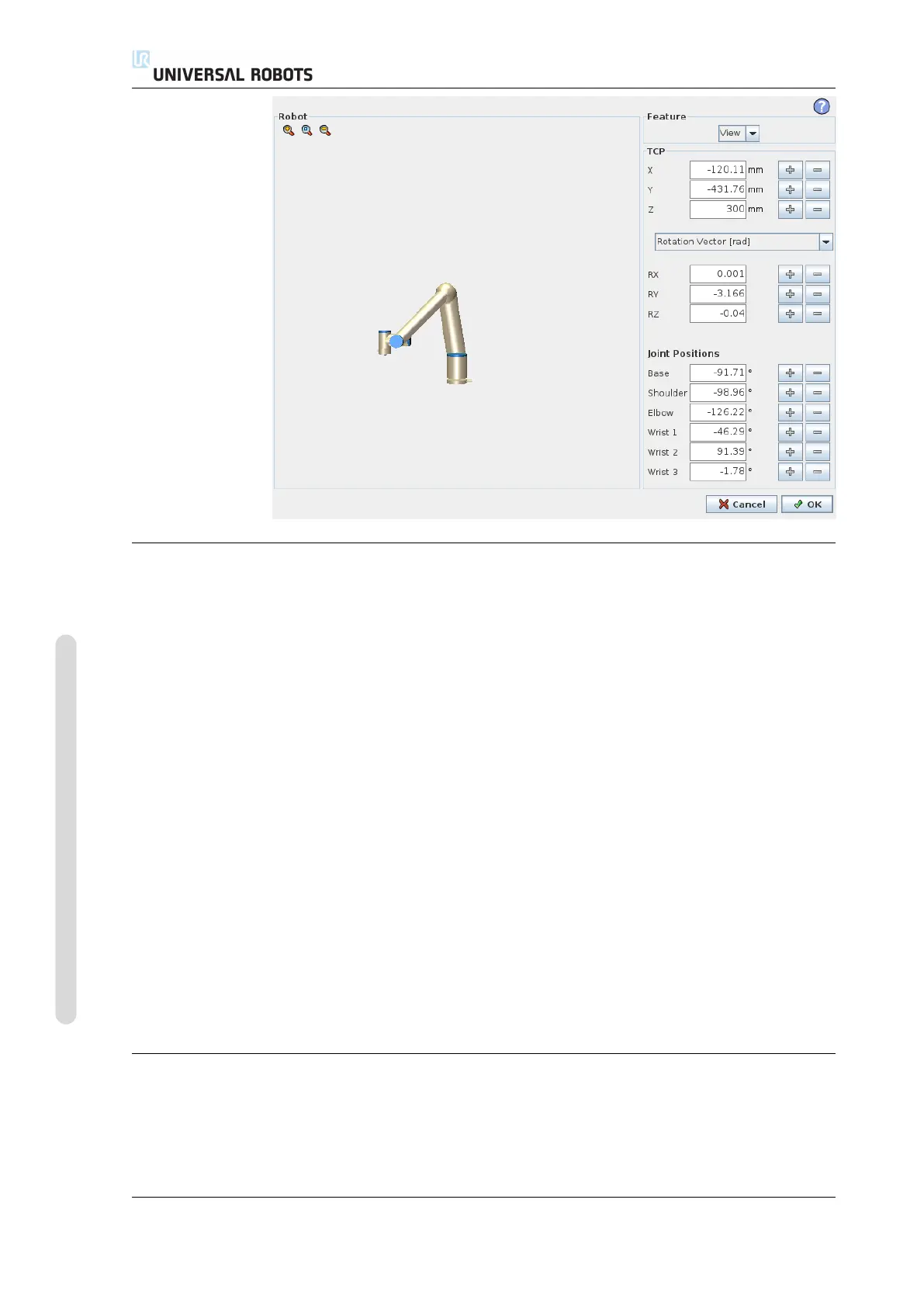
12.2 Pose Editor Screen
Robot
The current position of the robot arm and the specified new target position are
shown in 3D graphics. The 3D drawing of the robot arm shows the current position
of the robot arm, and the “shadow” of the robot arm shows the target position of
the robot arm controlled by the specified values on the right hand side of the screen.
Push the magnifying glass icons to zoom in/out or drag a finger across to change
the view.
If the specified target position of the robot TCP is close to a safety or trigger plane, or
the orientation of robot tool is near the tool orientation boundary limit (see 10.12),
a 3D representation of the proximate boundary limit is shown.
Safety planes are visualized in yellow and black with a small arrow representing
the plane normal, which indicates the side of the plane on which the robot TCP
is allowed to be positioned. Trigger planes are displayed in blue and green and a
small arrow pointing to the side of the plane, where the Normal mode limits (see
10.6) are active. The tool orientation boundary limit is visualized with a spherical
cone together with a vector indicating the current orientation of the robot tool. The
inside of the cone represents the allowed area for the tool orientation (vector).
When the target robot TCP no longer is in the proximity of the limit, the 3D rep-
resentation disappears. If the target TCP is in violation or very close to violating a
boundary limit, the visualization of the limit turns red.
Feature and tool position
In the top right corner of the screen, the feature selector can be found. The feature
selector defines which feature to control the robot arm relative to
Below the feature selector, the name of the currently active Tool Center Point (TCP)
is displayed. For further information about configuring several named TCPs, see 13.6.
CB3 II-32 Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
 Loading...
Loading...











