14.6 Command: Fixed Waypoint
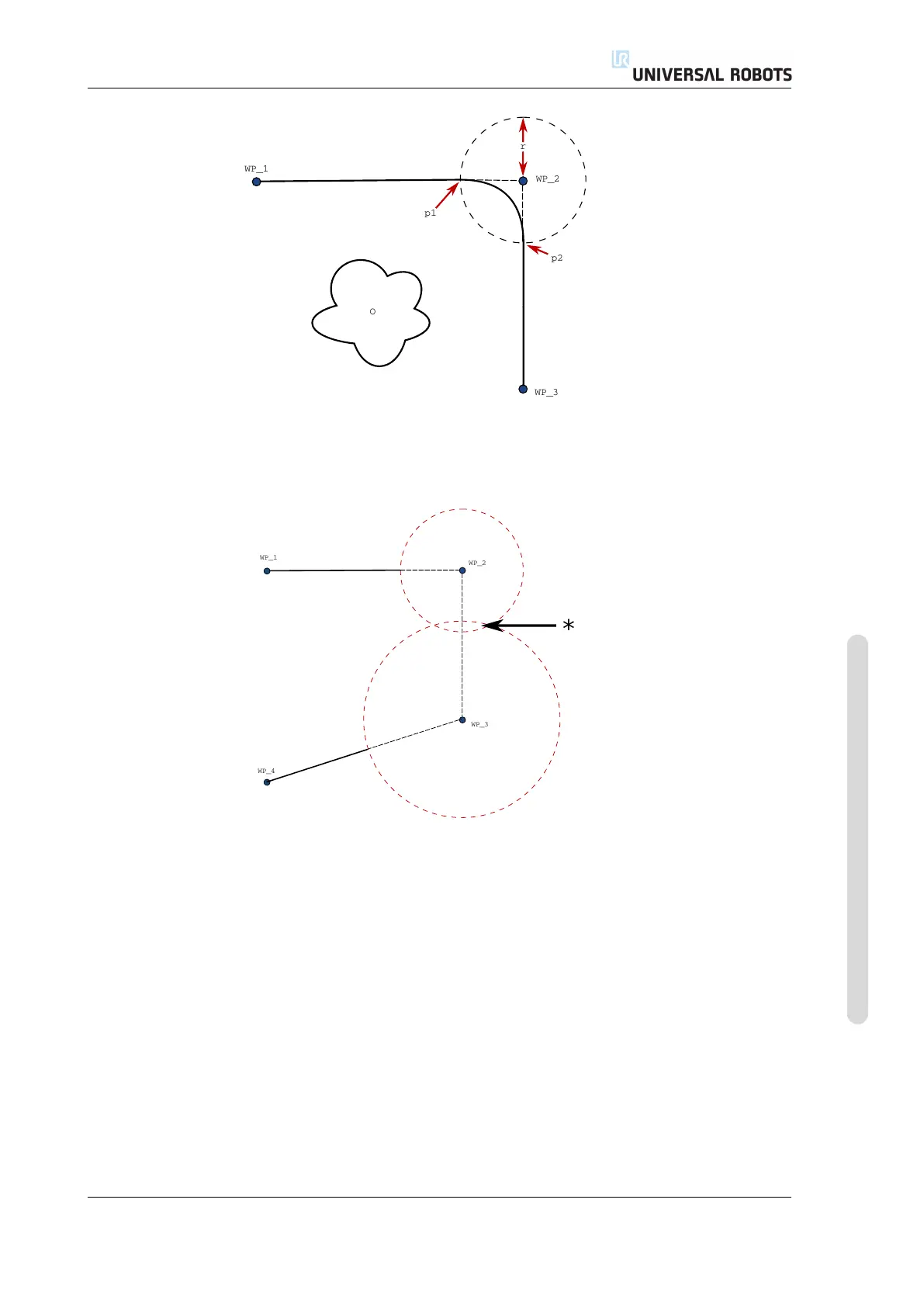
Figure 14.3: Blend over WP_2 with radius r, initial blend position at p1 and final blend position at p2 .
O is an obstacle.
Figure 14.4: Blend radius overlap not allowed (*).
That is, in the program in figure 14.5 the blend around WP_1 is affected by WP_2.
The consequence of this becomes more apparent when blending around WP_2 in
this example. There are two possible ending positions and to determine which
is the next waypoint to blend to, the robot must evaluate the current reading of
the digital_input[1] already when entering the blend radius. That means the
if...then expression (or other necessary statements to determine the following
waypoint, e.g. variable waypoints) is evaluated before we actually reach WP_2
which is somewhat counter-intuitive when looking at the program sequence. If
a waypoint is a stop point and followed by conditional expressions to determine
the next waypoint (e.g. the I/O command) it is executed when the robot arm has
stopped at the waypoint.
Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
II-75 CB3
 Loading...
Loading...











