14.6 Command: Fixed Waypoint
MoveL
WP_I
WP_1 (blend)
WP_2 (blend)
if (digital_input[1]) then
WP_F_1
else
WP_F_2
WP_I
WP_1
WP_2
WP_F_1
WP_F_2
*
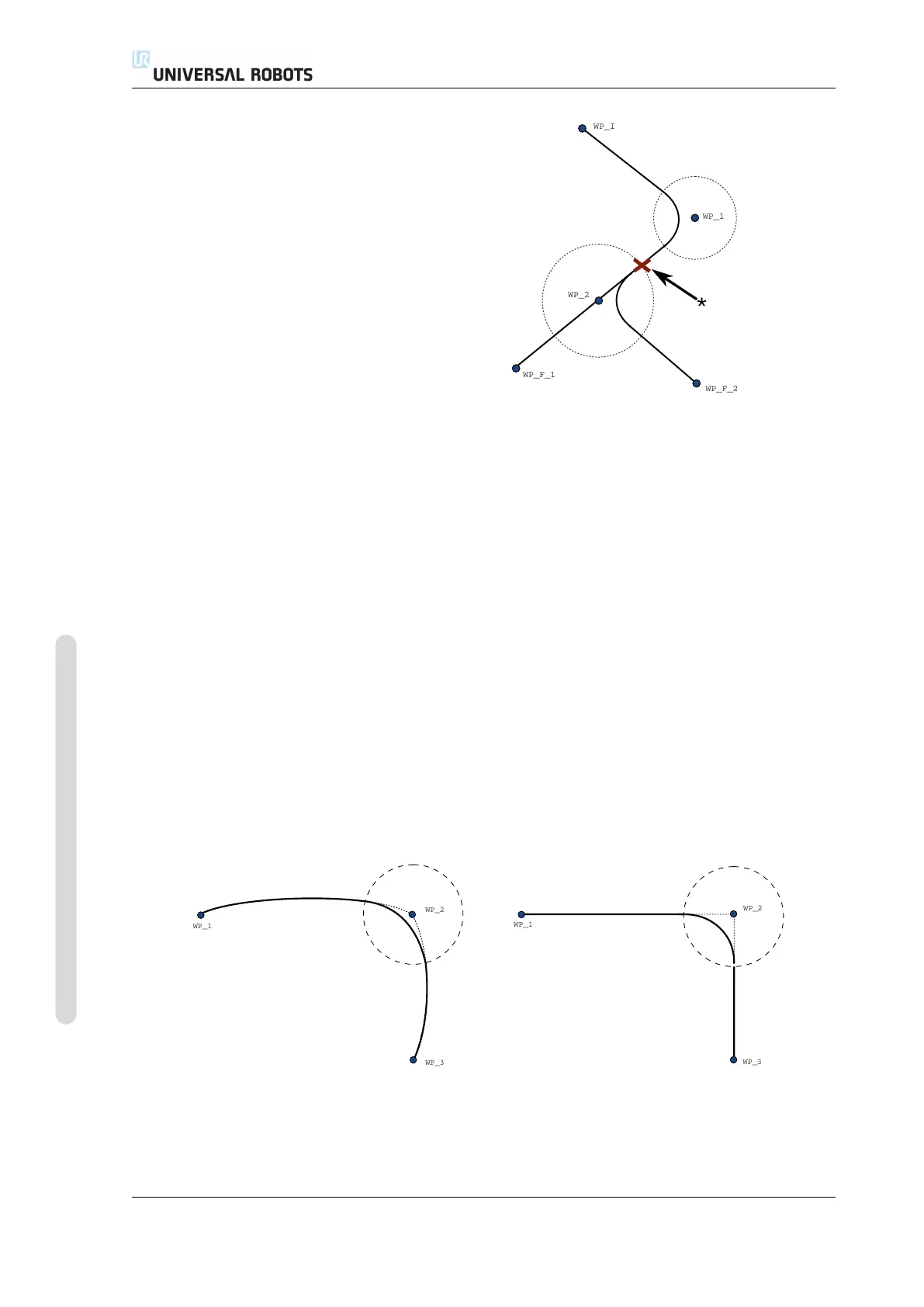
Figure 14.5: WP_I is the initial waypoint and there are two potential final waypoints WP_F_1 and
WP_F_2, depending on a conditional expression. The conditional if expression is evaluated when
the robot arm enters the second blend (*).
Trajectory type combinations It is possible to blend between all four combina-
tions of trajectory types of MoveJ and MoveL, but the specific combination will
affect the computed blend trajectory. There are 4 possible combinations:
1. MoveJ to MoveJ (Pure Joint space blend)
2. MoveJ to MoveL
3. MoveL to MoveL (Pure Cartesian space blend)
4. MoveL to MoveJ
Pure joint space blending (bullet 1) vs. pure Cartesian space blending (bullet 3) is
compared in figure 14.6. It shows two potential paths of the tool for identical sets
of waypoints.
Figure 14.6: Joint space (MoveJ) vs. cartesian space (MoveL) movement and blend.
CB3 II-76 Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
 Loading...
Loading...











