14.6 Command: Fixed Waypoint
Of the different combinations, bullets 2, 3 and 4 will result in trajectories that keep
within the boundaries of the original trajectory in Cartesian space. An example of
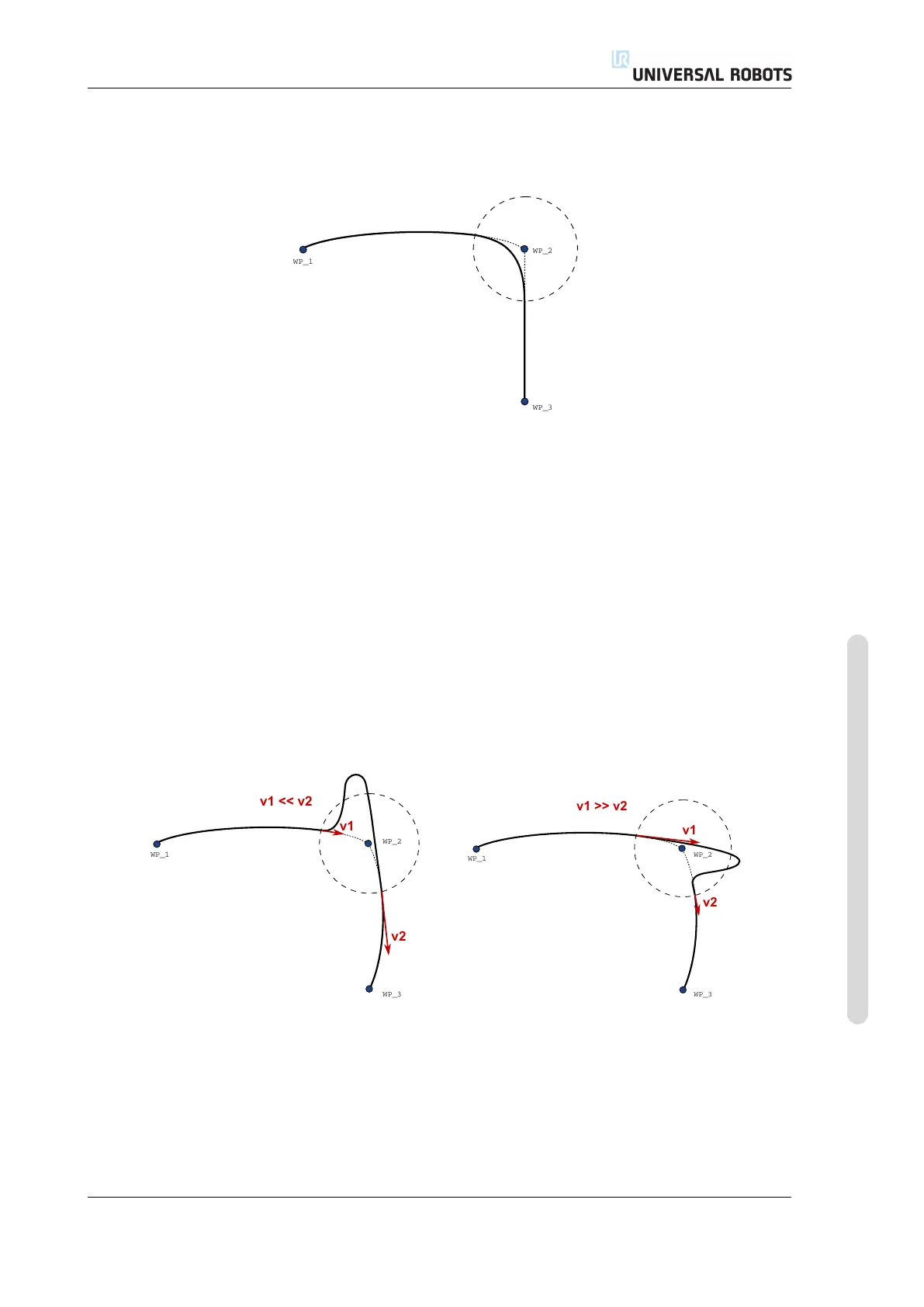
a blend between different trajectory types (bullet 2) can be seen in figure 14.7.
Figure 14.7: Blending from a movement in joint space (MoveJ) to linear tool movement (MoveL).
Pure joint space blends (bullet 1), however, may behave in a way that is less intu-
itive, since the robot will try to achieve the smoothest possible trajectory in Joint
space taking velocities and time requirements into account. Due to this, they may
deviate from the course specified by the waypoints. This is especially the case if
there are significant differences in a joint’s velocity between the two trajectories.
Caution: if the velocities are very different (e.g. by specifying advanced settings -
either velocity or time - for a specific waypoint) this can result in large deviations
from the original trajectory as shown in figure 14.8. If you need to blend between
different velocities and cannot accept this deviation consider a blend in Cartesian
space using MoveL instead.
Figure 14.8: Joint space blending when initial velocity v1 is significantly smaller than final velocity v2
or the opposite.
Version 3.4.5
Copyright © 2009–2017 by Universal Robots A/S. All rights reserved.
II-77 CB3
 Loading...
Loading...











