6.3 Troubleshooting Based on the Operation and Conditions of the Servomotor
6-51
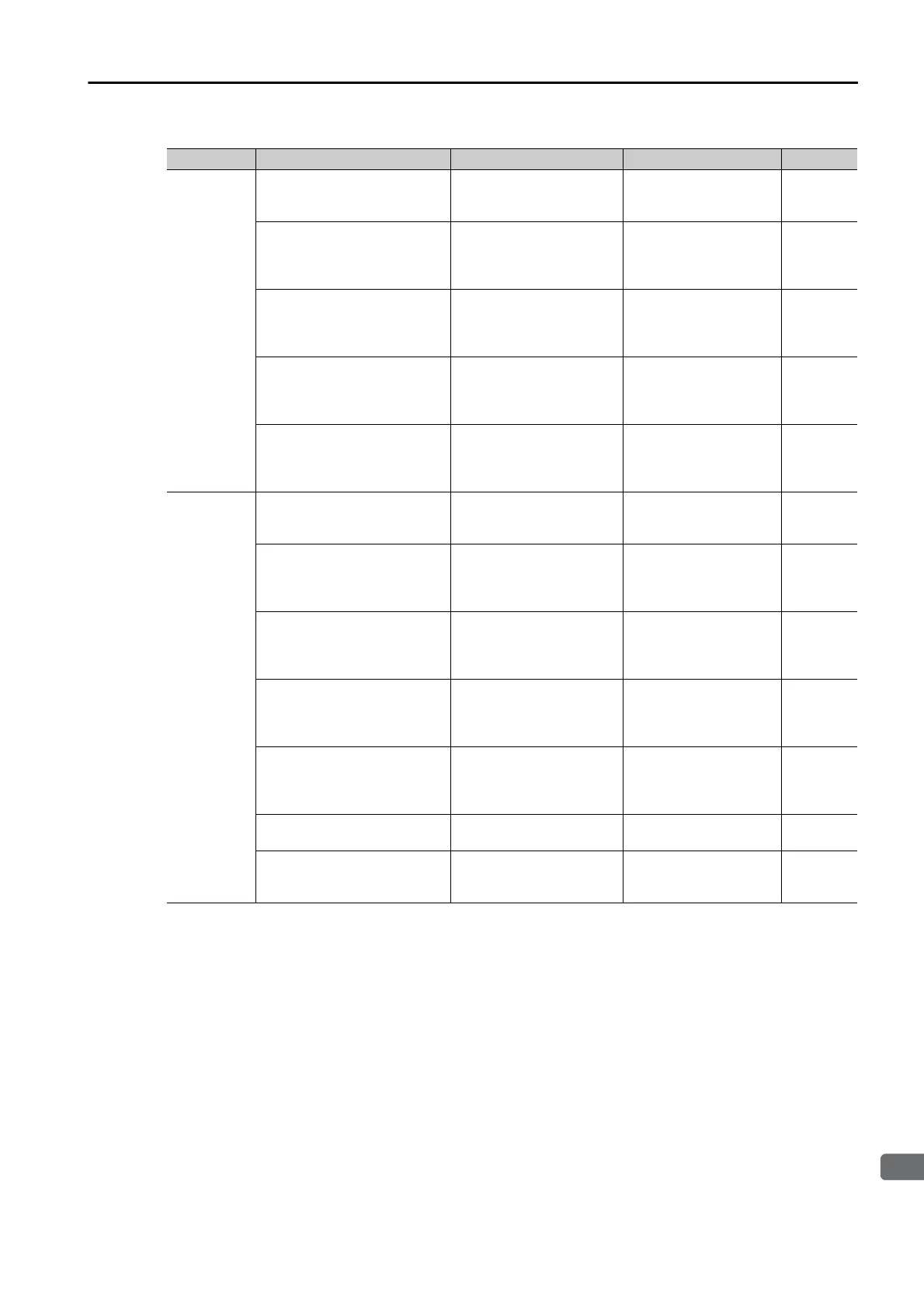
Servomotor
Vibrates at
Frequency
of Approx.
200 to 400
Hz.
The servo gains are not bal-
anced.
Check to see if the servo
gains have been cor-
rectly tuned.
Perform autotuning
without a host refer-
ence.
*
The setting of Pn100 (Speed
Loop Gain) is too high.
Check the setting of
Pn100.
The default setting is Kv =
40.0 Hz.
Set Pn100 to an appro-
priate value.
–
The setting of Pn102 (Posi-
tion Loop Gain) is too high.
Check the setting of
Pn102.
The default setting is Kp
= 40.0/s.
Set Pn102 to an appro-
priate value.
–
The setting of Pn101 (Speed
Loop Integral Time Con-
stant) is not appropriate.
Check the setting of
Pn101.
The default setting is Ti =
20.0 ms.
Set Pn101 to an appro-
priate value.
–
The setting of Pn103
(Moment of Inertia Ratio or
Mass Ratio) is not appropri-
ate.
Check the setting of
Pn103.
Set Pn103 to an appro-
priate value.
–
Large Motor
Speed
Overshoot
on Starting
and Stop-
ping
The servo gains are not bal-
anced.
Check to see if the servo
gains have been cor-
rectly tuned.
Perform autotuning
without a host refer-
ence.
*
The setting of Pn100 (Speed
Loop Gain) is too high.
Check the setting of
Pn100.
The default setting is Kv =
40.0 Hz.
Set Pn100 to an appro-
priate value.
–
The setting of Pn102 (Posi-
tion Loop Gain) is too high.
Check the setting of
Pn102.
The default setting is Kp
= 40.0/s.
Set Pn102 to an appro-
priate value.
–
The setting of Pn101 (Speed
Loop Integral Time Con-
stant) is not appropriate.
Check the setting of
Pn101.
The default setting is Ti =
20.0 ms.
Set Pn101 to an appro-
priate value.
–
The setting of Pn103
(Moment of Inertia Ratio or
Mass Ratio) is not appropri-
ate.
Check the setting of
Pn103.
Set Pn103 to an appro-
priate value.
–
The torque reference is satu-
rated.
Check the waveform of
the torque reference.
Use the mode switch.
–
The force limits (Pn483 and
Pn484) are set to the default
values.
The default values of the
force limits are Pn483 =
30% and Pn484 = 30%.
Set Pn483 and Pn484
to appropriate values.
*
Continued on next page.
Continued from previous page.
Problem Possible Cause Confirmation Correction Reference

 Loading...
Loading...







