7.3 List of MECHATROLINK-III Common Parameters
7-56
7.3 List of MECHATROLINK-III Common Parameters
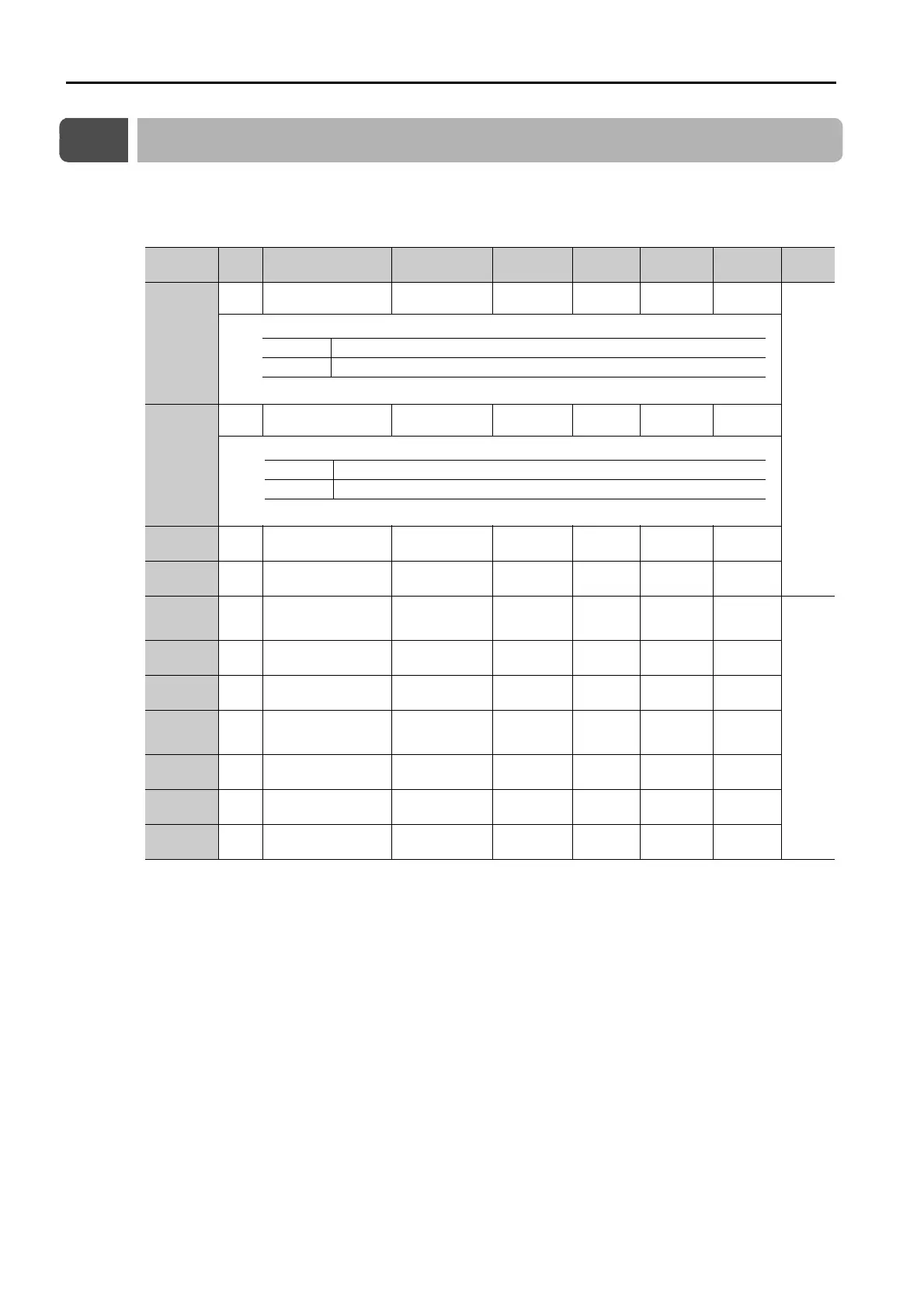
The following table lists the common MECHATROLINK-III parameters. These common parame-
ters are used to make settings from the host controller via MECHATROLINK communications.
Do not change the settings with the Digital Operator or any other device.
Parameter
No.
Size Name Setting Range
Setting Unit
[Resolution]
Default
Setting
Applicable
Motors
When
Enabled
Classi-
fication
01
PnA02
4
Encoder Type (read
only)
0h or 1h – – All –
Device information
02
PnA04
4
Motor Type (read
only)
0h or 1h – – All –
04
PnA08
4
Rated Speed
(read only)
0h to
FFFFFFFFh
1 min
-1
–All–
05
PnA0A
4
Maximum Output
Speed (read only)
0h to
FFFFFFFFh
1 min
-1
–All–
06
PnA0C
4
Speed Multiplier
(read only)
-1,073,741,823
to
1,073,741,823
––All–
Device information
07
PnA0E
4
Rated Torque
(read only)
0h to
FFFFFFFFh
1 Nm– All –
08
PnA10
4
Maximum Output
Torque (read only)
0h to
FFFFFFFFh
1 Nm– All –
09
PnA12
4
Torque Multiplier
(read only)
-1,073,741,823
to
1,073,741,823
––All–
0A
PnA14
4
Resolution
(read only)
0h to
FFFFFFFFh
1 pulse/rev – Rotary –
0B
PnA16
4 Linear Scale Pitch 0 to 65,536,000
1 nm
[0.01 μm]
0Linear
After
restart
0C
PnA18
4
Pulses per Scale
Pitch (read only)
0h to
FFFFFFFFh
1 pulse/
pitch
–Linear–
Continued on next page.
0000h Absolute encoder
0001h Incremental encoder
0000h Rotary Servomotor
0001h Linear Servomotor

 Loading...
Loading...







