7.2 List of Servo Parameters
7-4
7.2
List of Servo Parameters
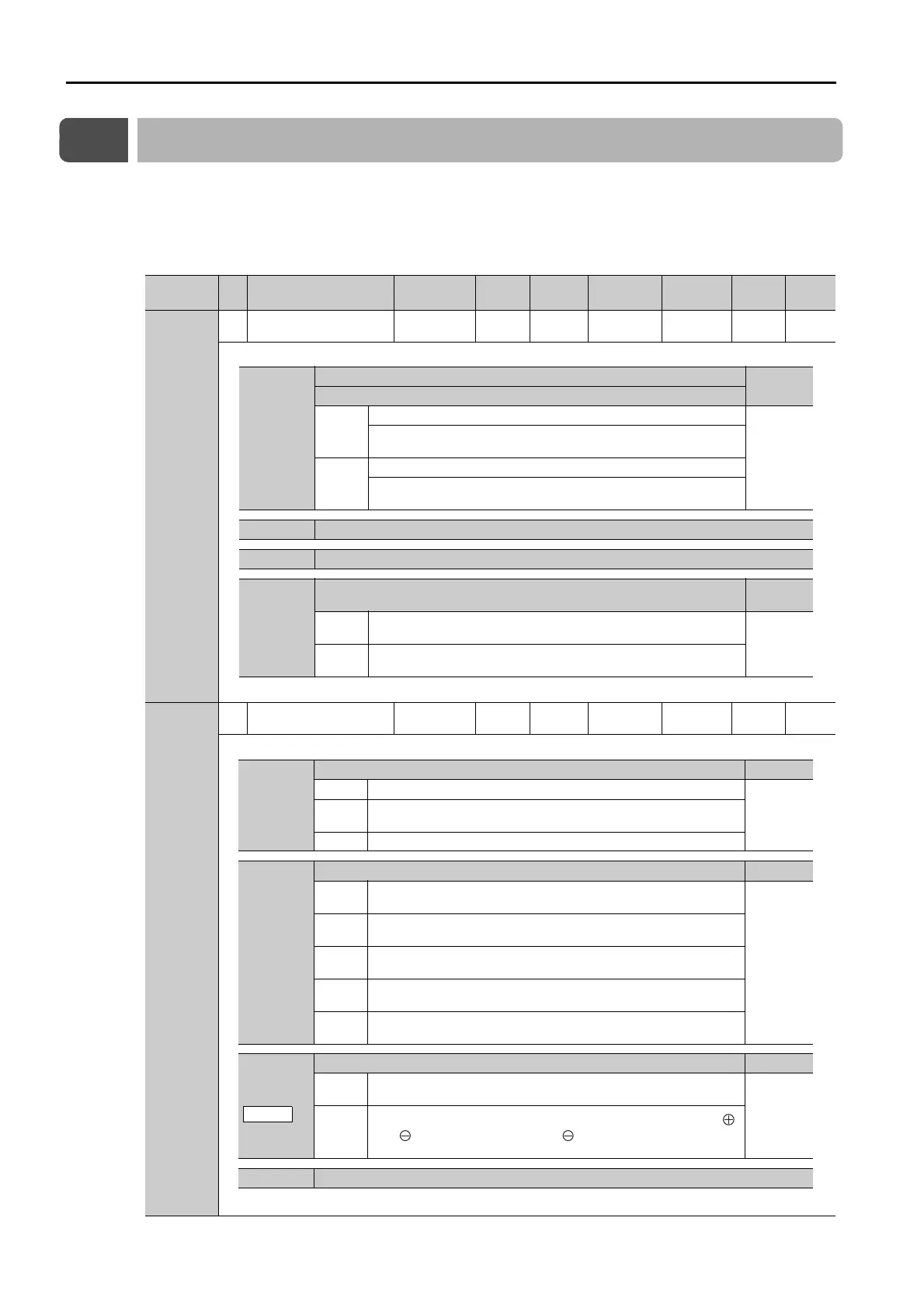
The following table lists the parameters.
Note: Do not change the following parameters from their default settings.
• Reserved parameters
• Parameters not given in this manual
• Parameters that are not valid for the Servomotor that you are using, as given in the parameter table
Parameter
No.
Size
Name
Setting
Range
Setting
Unit
Default
Setting
Applicable
Motors
When
Enabled
Classi-
fication
Refer-
ence
Pn000
2
Basic Function Selec-
tions 0
0000h
to
10B1h
– 0000h All
After
restart
Setup –
Pn001
2
Application Function
Selections 1
0000h
to
1142h
– 0000h All
After
restart
Setup –
Continued on next page.
n.X
Rotation Direction Selection
Reference
Movement Direction Selection
0
Use CCW as the forward direction.
*1
Use the direction in which the linear encoder counts up as the for-
ward direction.
1
Use CW as the forward direction. (Reverse Rotation Mode)
Use the direction in which the linear encoder counts down as the
forward direction. (Reverse Movement Mode)
n.X Reserved parameter (Do not change.)
n.X Reserved parameter (Do not change.)
n.X
Rotary/Linear Servomotor Startup Selection When Encoder Is Not Con-
nected
Reference
0
When an encoder is not connected, start as SERVOPACK for
Rotary Servomotor.
*1
1
When an encoder is not connected, start as SERVOPACK for Lin-
ear Servomotor.
n.X
Motor Stopping Method for Servo OFF and Group 1 Alarms Reference
0 Stop the motor by applying the dynamic brake.
*1
1
Stop the motor by the applying dynamic brake and then release
the dynamic brake.
2 Coast the motor to a stop without the dynamic brake.
n.X
Overtravel Stopping Method Reference
0
Apply the dynamic brake or coast the motor to a stop (use the
stopping method set in Pn001 = n.X).
*1
1
Decelerate the motor to a stop using the torque set in Pn406 as
the maximum torque and then servo-lock the motor.
2
Decelerate the motor to a stop using the torque set in Pn406 as
the maximum torque and then let the motor coast.
3
Decelerate the motor to a stop using the deceleration time set in
Pn30A and then servo-lock the motor.
4
Decelerate the motor to a stop using the deceleration time set in
Pn30A and then let the motor coast.
n.X
Main Circuit Power Supply AC/DC Input Selection Reference
0
Input AC power as the main circuit power supply using the L1, L2,
and L3 terminals (do not use shared converter).
*1
1
Input DC power as the main circuit power supply using the B1/
and 2 terminals or the B1 and 2 terminals (use an external
converter or the shared converter).
n.X Reserved parameter (Do not change.)

 Loading...
Loading...







