4.5 CSTP_S in the I/O Signal Status Monitor
4.5.1 SVCMD_IO (I/O Signal Status) Field
4-8
4.5
CSTP_S in the I/O Signal Status Monitor
CSTP_S (Synchronized Stopping Status) can be checked with bit 31 of the servo command I/O
signal (SVCMD_IO) command through MECHATROLINK-III communications.
4.5.1
SVCMD_IO (I/O Signal Status) Field
4.5.2
Details of I/O Signal Status Bits
The following table shows the details of CSTP_S.
Note: IO_STS8 is allocated to bit 31 in the Σ-7W SERVOPACK with MECHATROLINK-III Communications Refer-
ences (SGD7W-A20), but CSTP_S is allocated to bit 31 in this product.
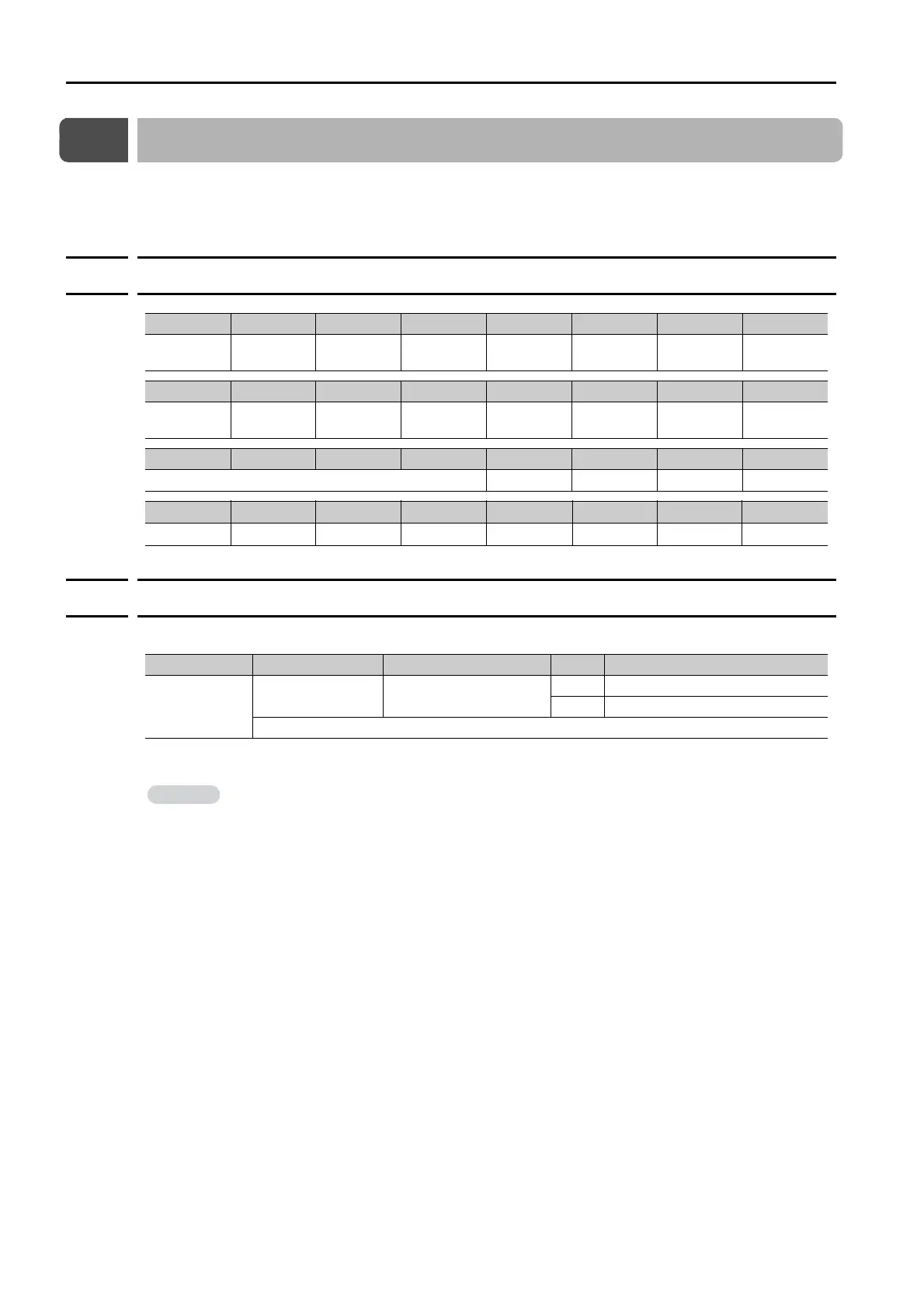
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
ESTP EXT3 EXT2 EXT1 N-OT P-OT DEC
Reserved
(0)
Bit 15 Bit 14 Bit 13 Bit 12 Bit 11 Bit 10 Bit 9 Bit 8
ZPOINT PSET NEAR DEN N-SOT P-SOT BRK_ON
Reserved
(0)
Bit 23 Bit 22 Bit 21 Bit 20 Bit 19 Bit 18 Bit 17 Bit 16
Reserved (0) ZSPD V_CMP V_LIM T_LIM
Bit 31 Bit 30 Bit 29 Bit 28 Bit 27 Bit 26 Bit 25 Bit 24
CSTP_S IO_STS7 IO_STS6 IO_STS5 IO_STS4 IO_STS3 IO_STS2 IO_STS1
Bit Name Description Value Setting
31
CSTP_S
Synchronized Stopping
Status
0 During normal operation
1 During synchronized stopping
The status used to judge the state of synchronized stopping.
In synchronized stopping mode 3, both axes are almost simultaneously set to the servo OFF
state immediately after an alarm occurs. Therefore, CSTP_S which represents the synchro-
nized stopping status will not change, but it will instead remaining as the during normal oper-
ation status.

 Loading...
Loading...







