3.5 Monitoring
3.5.3 MECHATROLINK-III Monitoring
3-26
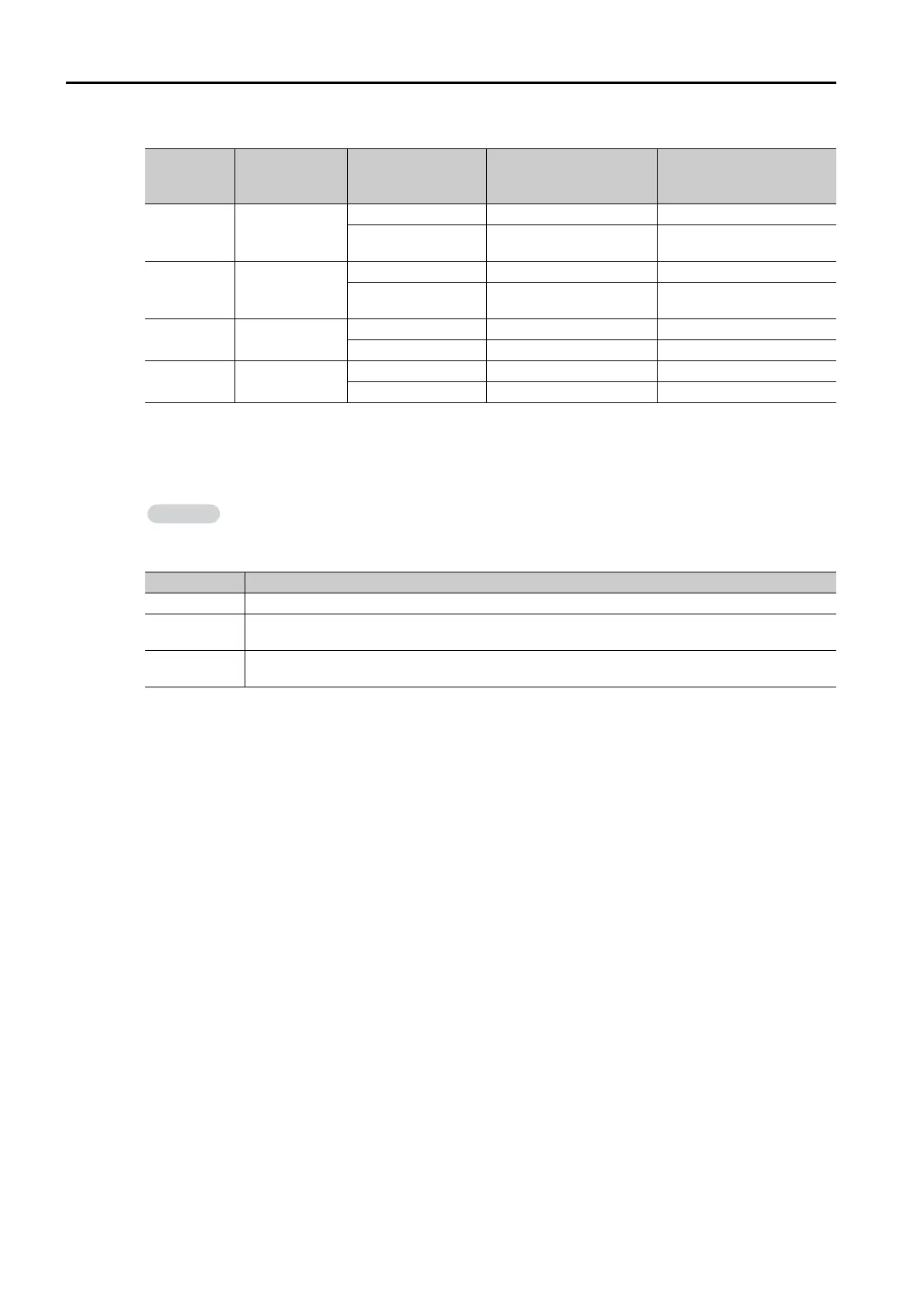
SVCMD_IO (Servo Command Input Signal) Monitoring
The output specification of servo command input signal monitoring is given in the following
table.
CCMN1
TPOS Target Position PnB12 (PnB14) = 0000H
IPOS
Command Position
(before filtering)
PnB12 (PnB14) = 0001H
DCMN2
TPOS Target Position PnB12 (PnB14) = 0000H
IPOS
Command Position
(before filtering)
PnB12 (PnB14) = 0001H
EOMN1
LstLpos1 Last Latched Position 1 Pn824 (Pn825) = 0080H
LstLpos2 Last Latched Position 2 Pn824 (Pn825) = 0081H
FOMN2
LstLpos1 Last Latched Position 1 Pn824 (Pn825) = 0080H
LstLpos2 Last Latched Position 2 Pn824 (Pn825) = 0081H
Servo command input signal monitoring not listed in the following table has the same output
specification as the
Σ-7W SERVOPACK with MECHATROLINK-III Communications Refer-
ences (SGD7W-
A20).
Signal Name Description
DEN DEN = 1 when distribution of TPOS + correction amount has completed.
PSET
PSET = 1 when DEN = 1 (Distribution Completed) and position deviation is | (TPOS + correc-
tion amount) - (APOS + correction amount) | ≤ Pn522 (Positioning Completed Width).
NEAR
NEAR = 1 when position deviation is | (TPOS + correction amount) - (APOS + correction
amount) | ≤ Pn524 (Near Signal Width).
Continued from previous page.
Selection
Code
Monitor Name
Monitor Name
When CMN or OMN
Is Selected
Description Information

 Loading...
Loading...







