3.1 Outline
3-2
3.1
Outline
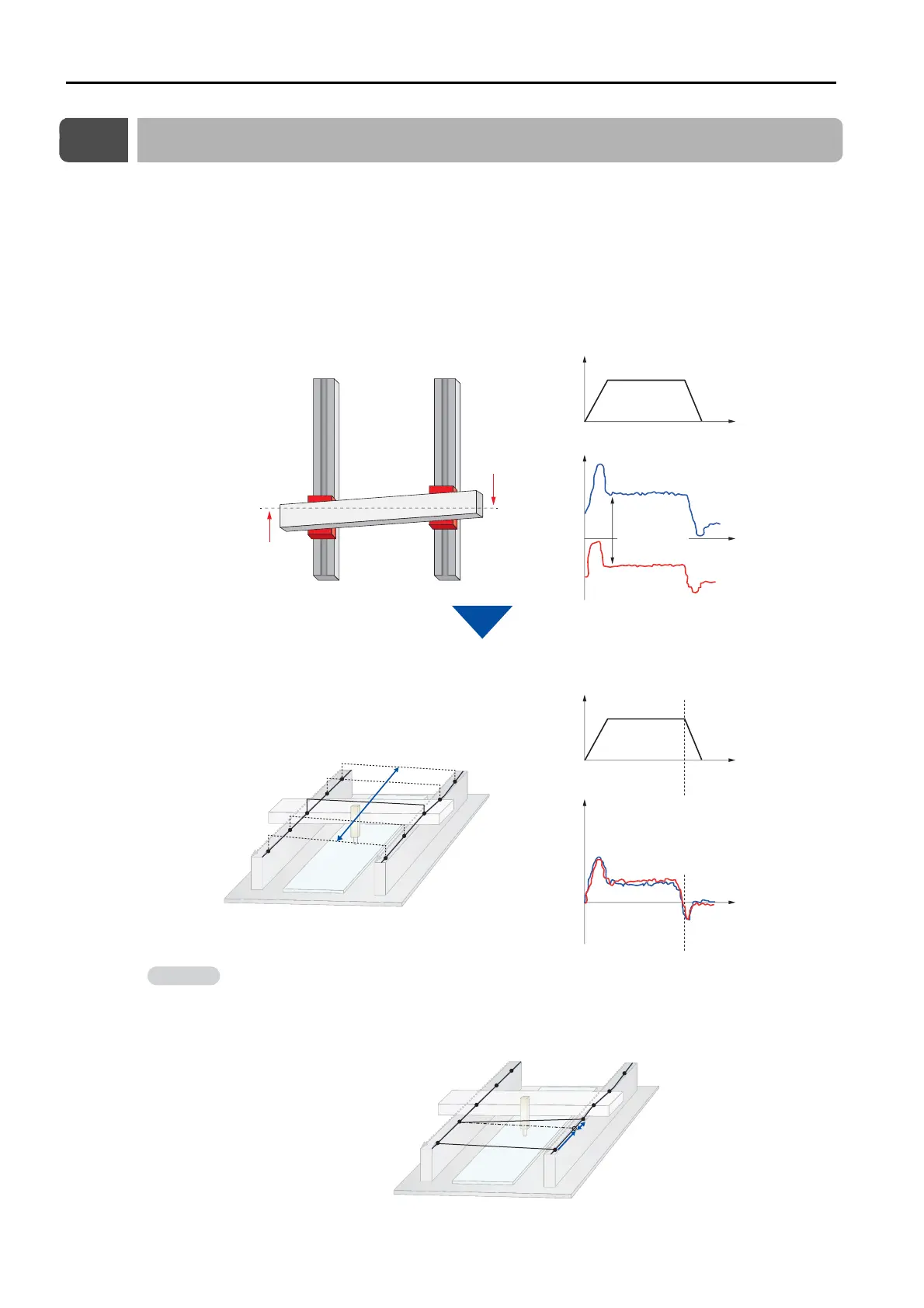
The Position Correction Table is used to drive the Servomotors while correcting the position
based on the correction amounts set in the table in order to minimize wasted torque produced
by mechanical differences in the machine.
Using this function can reduce cycle time because it can drive the Servomotors without pro-
ducing wasted torque between two axes.
The SERVOPACK adds the correction amount to the reference position from the host control-
ler, and then it moves the slave axis.
For this reason, the coordinate position of the slave axis is offset from the reference position
from the host controller by only the added correction amount.
Master axis
Slave axis
Pm1
Pm2
Pm3
Pm4
Pm5
Ps1
Ps2
Ps3
Ps4
Ps5
Master axisSlave axis
Torque
Torque
Speed
Time
Master axis
0
0
Slave axis
Time
Torque
Time
Torque
Speed
Time
Tension is produced between the axes when the
Servomotors are driven due to mechanical
differences, and this produces wasted torque.
Wasted torque produced due to mechanical differences
can be minimized by driving the Servomotors while
correcting the position of the slave axis based on the
correction amounts set in the table.
Wasted torque is
not produced
between the
master and slave
axes.
This much
wasted
torque is
produced.
Master axisSlave axis
Reference position
from host controller
Correction amount

 Loading...
Loading...







