7.1 Parameter Lists
7.1.2 Interpreting the MECHATROLINK-III Common Parameter Lists
7-3
7.1.2
Interpreting the MECHATROLINK-III Common Parameter
Lists
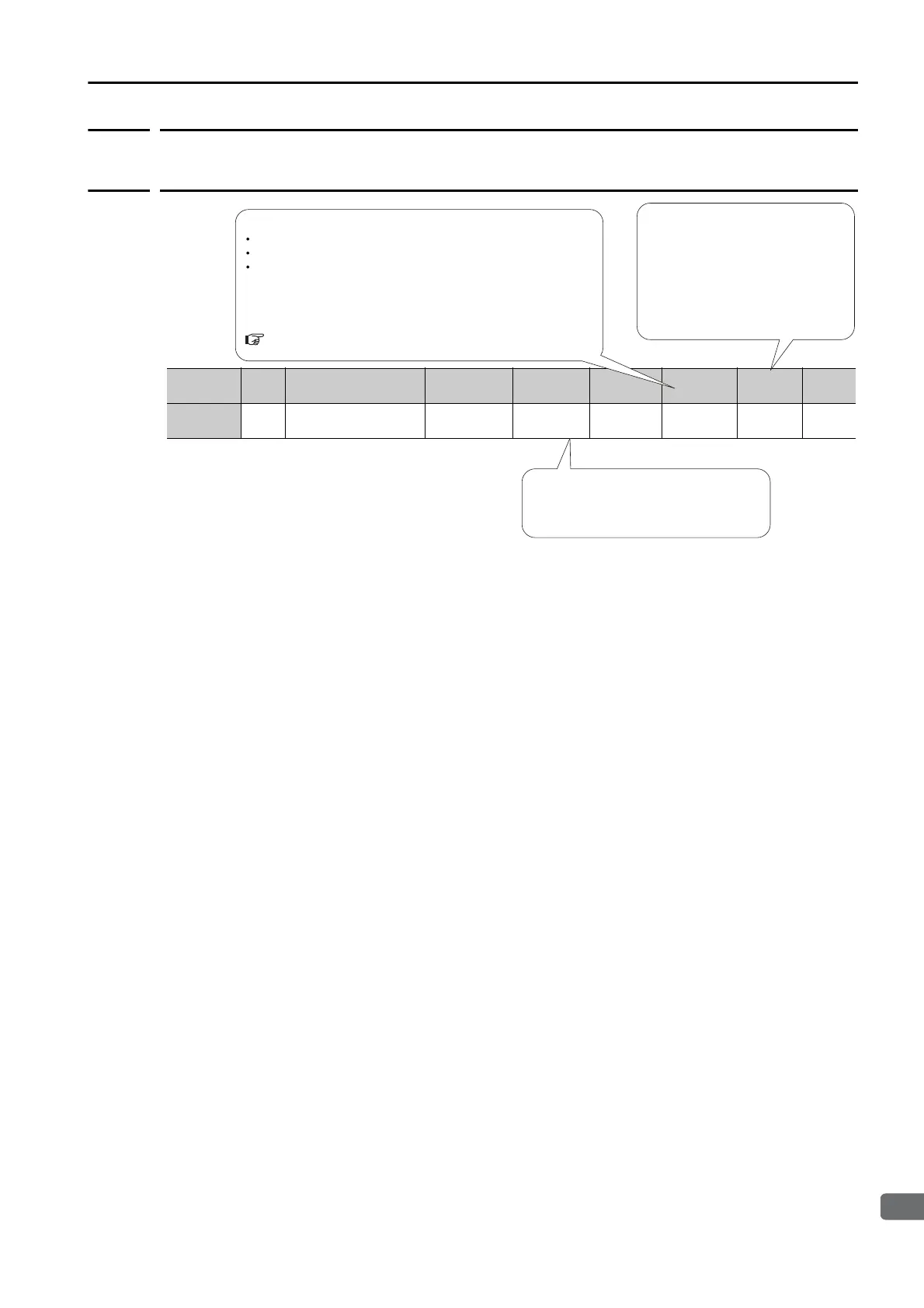
Parameter
No.
Size Name
Setting
Range
Setting Unit
[Resolution]
Default
Setting
Applicable
Motors
When
Enabled
Classi-
fication
61
PnAC2
4 Speed Loop Gain
1,000 to
2,000,000
0.001 Hz
[0.1 Hz]
40000 All
Immedi-
ately
Tuning
All: The parameter is used for both Rotary Servomotors and Linear Servomotors.
Rotary: The parameter is used for only Rotary Servomotors.
Linear: The parameter is used for only Linear Servomotors.
The types of Servomotors to which the parameter applies.
Rotary Servomotor terms are used for parameters that are
applicable to all Servomotors. If you are using a Linear Servomotor,
you need to interpret the terms accordingly. Refer to the following
section for details.
Differences in Terms for Rotary Servomotors and
Linear Servomotors on page xii
Indicates when a change to the
parameter will be effective.
“After restart” indicates parameters
that will be effective after one of the
following is executed.
• The power supply is turned OFF
and ON again.
• The CONFIG command is sent.
• A software reset is executed.
You can set the parameter in increments of
the setting unit.
However, if a unit is given in square brackets,
the setting is automatically converted to the
resolution given in the square brackets.

 Loading...
Loading...







