7.2 List of Servo Parameters
7-55
*1. Refer to the following manual for details.
Σ-7-Series Σ-7W SERVOPACK with MECHATROLINK-III Communications References Product Manual
(Manual No.: SIEP S800001 29)
*2. Refer to the following manual for details.
Σ-7-Series AC Servo Drive MECHATROLINK-III Communications Standard Servo Profile Command Manual
(Manual No.: SIEP S800001 31)
*3. Set a percentage of the motor rated torque.
*4. Normally set this parameter to 0. If you use an External Regenerative Resistor, set the capacity (W) of the Exter-
nal Regenerative Resistor.
*5. The upper limit is two times the maximum output capacity (W) of the SERVOPACK.
*6. These parameters are for SERVOPACKs with the dynamic brake option. Refer to the following manual for
details.
Σ-7-Series AC Servo Drive Σ-7S/Σ-7W SERVOPACK with Dynamic Brake Hardware Option Specifications Prod-
uct Manual (Manual No.: SIEP S800001 73)
*7. The SGLFW2 is the only Yaskawa Linear Servomotor that supports this function.
*8. Enabled only when Pn61A is set to n.2 or n.3.
*9. This parameter is valid only when the MECHATROLINK-III standard servo profile is used.
*10.The parameter setting is enabled after SENS_ON command execution is completed.
*11.Change the setting when the reference is stopped (i.e., while DEN is set to 1). If you change the setting during
operation, the reference output will be affected.
*12.The settings are updated only if the reference is stopped (i.e., only if DEN is set to 1).
*13.Refer to the following manual for details.
Σ-7-Series AC Servo Drive MECHATROLINK-II Communications Command Manual (Manual No.: SIEP S800001
30)
*14.This parameter is valid only when the MECHATROLINK-II-compatible profile is used.
*15.The setting of Pn842 is valid while Pn817 is set to 0.
*16.The setting of Pn844 is valid while Pn818 is set to 0.
*17.You can check overspeed detection speed with MECHATROLINK-III Common Parameter 05 PnA0A (Maximum
Output Speed).
Pn884
2
Communications Con-
trols 2
0000h to
0001h
– 0000h All
Immedi-
ately
Setup
*2
Pn88A 2
MECHATROLINK
Receive Error Counter
Monitor
(for maintenance, read
only)
0 to 65,535 – 0 All – Setup –
Pn890 to
Pn8A6
4
Command Data Moni-
tor during Alarm/Warn-
ing
(for maintenance, read
only)
0h to
FFFFFFFFh
–0h All –Setup
*1
Pn8A8 to
Pn8BE
4
Response Data Monitor
during Alarm/Warning
(for maintenance, read
only)
0h to
FFFFFFFFh
–0h All –Setup
*1
Pn900 2
Number of Parameter
Banks
0 to 16 – 0 All
After
restart
Setup
*2
Pn901 2
Number of Parameter
Bank Members
0 to 15 – 0 All
After
restart
Setup
*2
Pn902 to
Pn910
2
Parameter Bank Mem-
ber Definition
0000h to
08FFh
– 0000h All
After
restart
Setup
*2
Pn920 to
Pn95F
2
Parameter Bank Data
(Not saved in nonvolatile
memory.)
0000h to
FFFFh
– 0000h All
Immedi-
ately
Setup
*2
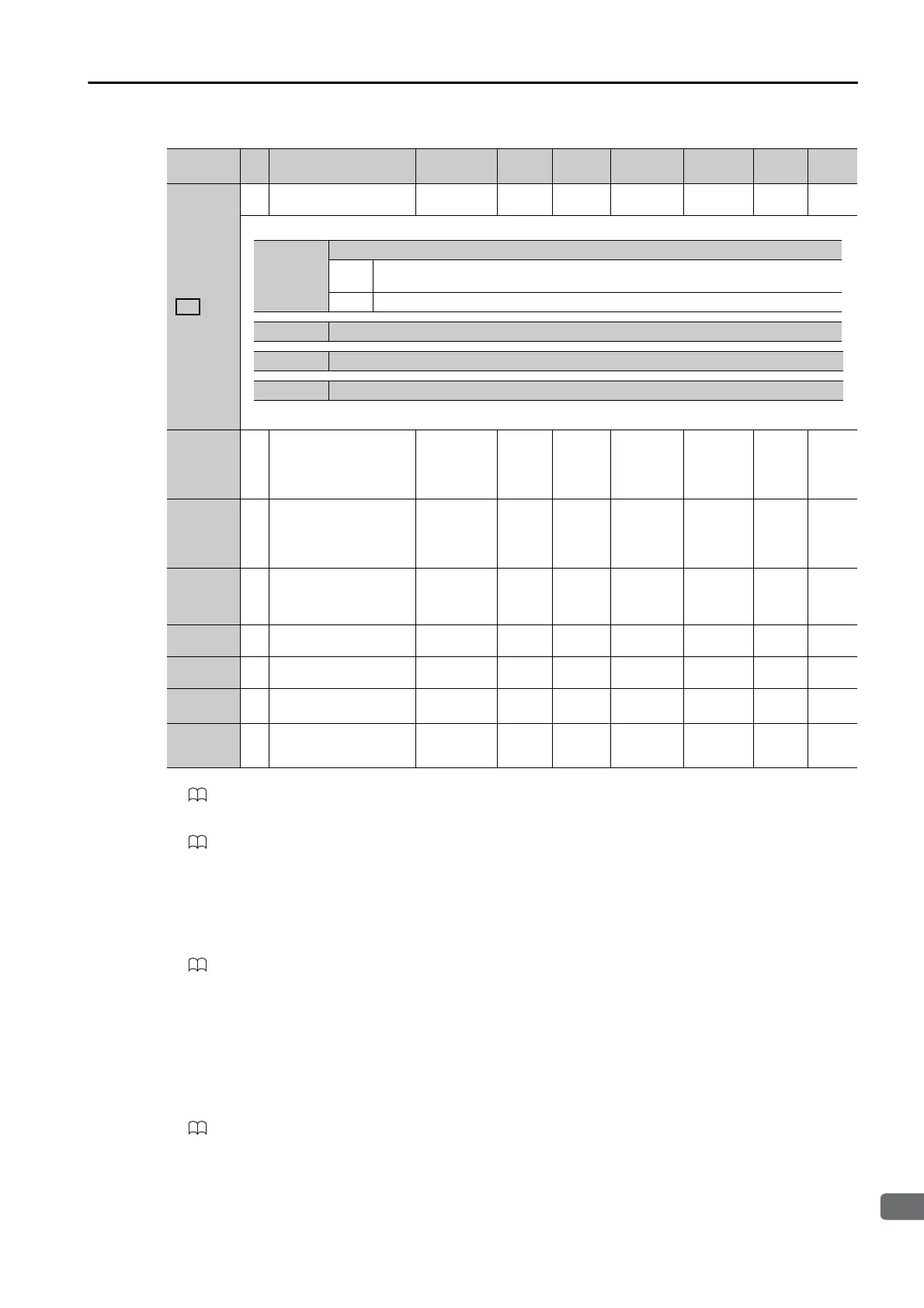
Continued from previous page.
Parameter
No.
Size
Name
Setting
Range
Setting
Unit
Default
Setting
Applicable
Motors
When
Enabled
Classi-
fication
Refer-
ence
n.X
MECHATROLINK Communications Error Holding Brake Signal Setting
0
Maintain the status set by the BRK_ON or BRK_OFF command when a MECHA-
TROLINK communications error occurs.
1 Apply the holding brake when a MECHATROLINK communications error occurs.
n.X Reserved parameter (Do not change.)
n.X Reserved parameter (Do not change.)
n.X Reserved parameter (Do not change.)

 Loading...
Loading...







