7.3 List of MECHATROLINK-III Common Parameters
7-63
*1. The parameter setting is enabled after SENS_ON command execution is completed.
*2. If you set the Speed Unit Selection (parameter 41) to either 0002h or 0003h, set the Speed Base Unit Selection
(parameter 42) to a number between -3 and 0.
*3. If you set the Speed Unit Selection (parameter 41) to 0004h, set the Speed Base Unit Selection (parameter 42)
to 0.
*4. If you set the Torque Unit Selection (parameter 47) to 0002h, set the Torque Base Unit Selection (parameter 48)
to 0.
*5. Change the setting when the reference is stopped (i.e., while DEN is set to 1). If you change the setting during
operation, the reference output will be affected.
93
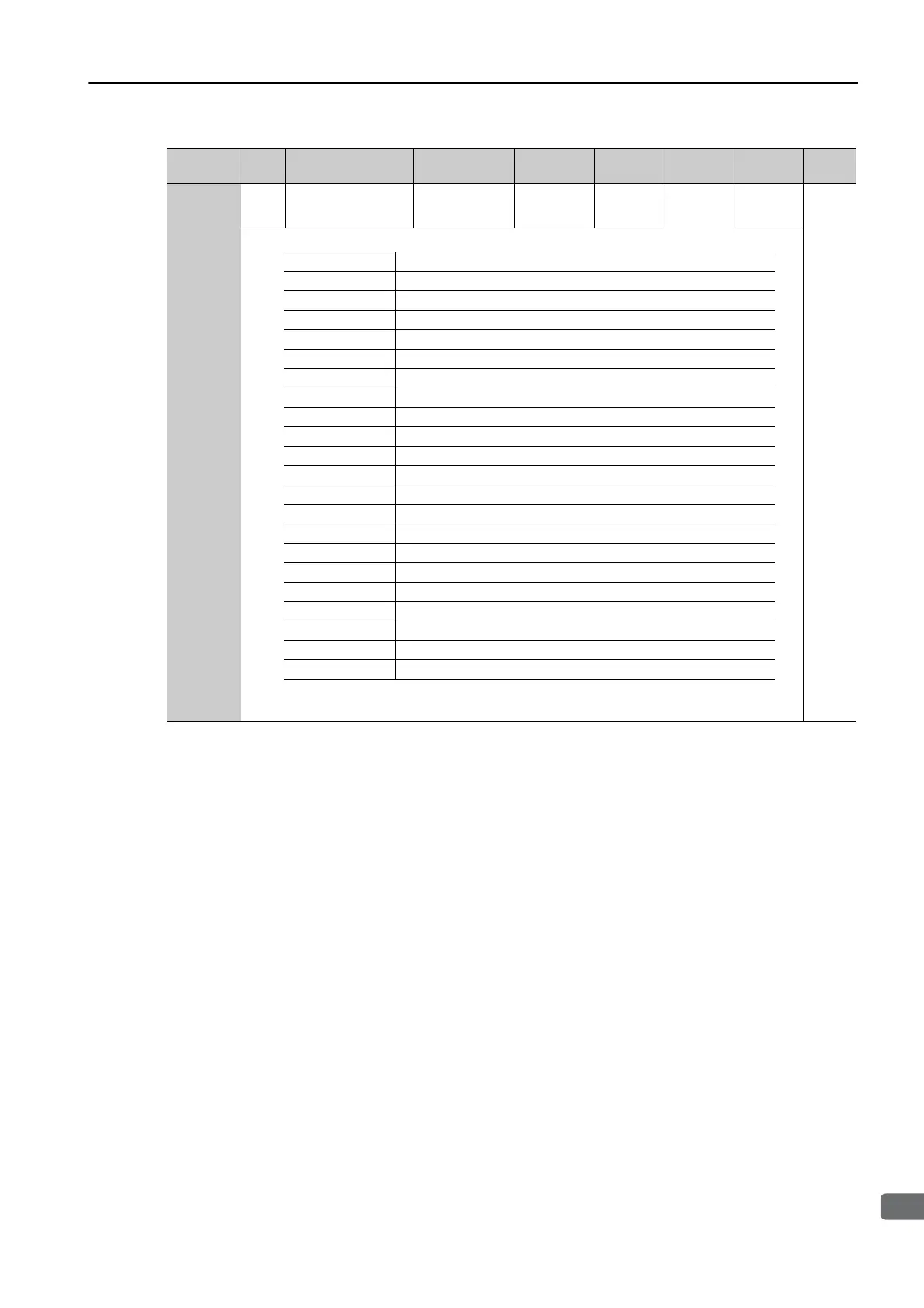
PnB26
4
I/O Bit Enabled/Dis-
abled (Input) (read
only)
––
FF0FFEFE
h
All –
Command-related parameters
Continued from previous page.
Parameter
No.
Size Name Setting Range
Setting Unit
[Resolution]
Default
Setting
Applicable
Motors
When
Enabled
Classi-
fication
Bit 0 Reserved (0: Disabled).
Bit 1 DEC (1: Enabled)
Bit 2 P-OT (1: Enabled)
Bit 3 N-OT (1: Enabled)
Bit 4 EXT1 (1: Enabled)
Bit 5 EXT2 (1: Enabled)
Bit 6 EXT3 (1: Enabled)
Bit 7 ESTP (1: Enabled)
Bit 8 Reserved (0: Disabled).
Bit 9 BRK_ON (1: Enabled)
Bit 10 P-SOT (1: Enabled)
Bit 11 N-SOT (1: Enabled)
Bit 12 DEN (1: Enabled)
Bit 13 NEAR (1: Enabled)
Bit 14 PSET (1: Enabled)
Bit 15 ZPOINT (1: Enabled)
Bit 16 T_LIM (1: Enabled)
Bit 17 V_LIM (1: Enabled)
Bit 18 V_CMP (1: Enabled)
Bit 19 ZSPD (1: Enabled)
Bits 20 to 23 Reserved (0: Disabled).
Bits 24 to 31 IO_STS1 to IO_STS8 (1: Enabled)

 Loading...
Loading...







