Refitting of wrist unit
Use this procedure to refit the wrist unit.
NoteAction
DANGER
Turn off all:
• electric power supply
• hydraulic pressure supply
• air pressure supply
to the robot, before entering the robot working
area.
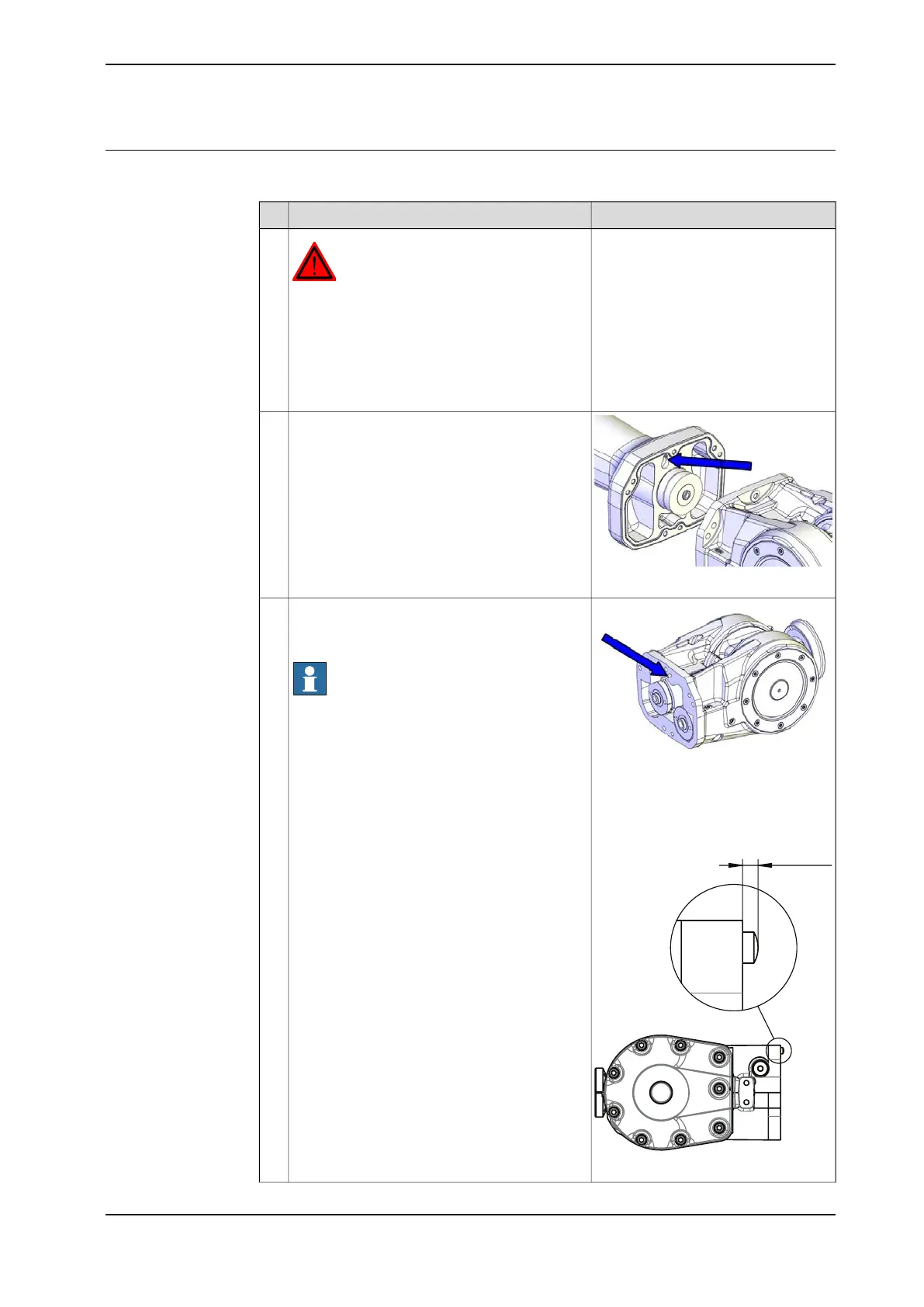
1
xx1600000690
Check if there is a parallel pin hole in the upper
arm tube.
The hole is available on robots that are calib-
rated with the Axis Calibration method.
2
xx1600000689
If there is a hole, fit the parallel pin into the
corresponding hole in the wrist (enclosed with
the new wrist spare part).
Note
If the parallel pin is not installed on a robot cal-
ibrated with Axis Calibration, the calibration
result will be affected negatively.
3
Verify that the parallel pin sticks out
from the wrist according to the meas-
urement given below.
xx1600000703
Continues on next page
Product manual - IRB 2600 265
3HAC035504-001 Revision: Q
© Copyright 2009-2018 ABB. All rights reserved.
4 Repair
4.4.3 Replacing wrist unit
Continued

 Loading...
Loading...





