NoteAction
Clean all assembly surfaces.4
Remove any painting from the assembly sur-
faces, with a knife.
See the figure in:
• Location of wrist unit on
page 262
Check the o-ring. Replace if damaged.5
Prepare the refitting of the wrist by inserting the
attachment screws and washers in the upper
arm tube.
6
CAUTION
The robot wrist unit weighs 15 kg.
All lifting accessories used must be sized ac-
cordingly!
7
Carefully put the wrist unit in its place on the
upper arm.
CAUTION
Do not damage gears!
8
CAUTION
Make sure that the o-ring stays in place on the
wrist unit!
xx1000000223
Adjust the play of the wrist by following these
steps:
• Push the wrist as shown in the figure to
locate the smallest play in the same way
as for adjustment of motors for axes 4,
5 and 6. See Refitting motors on page 313.
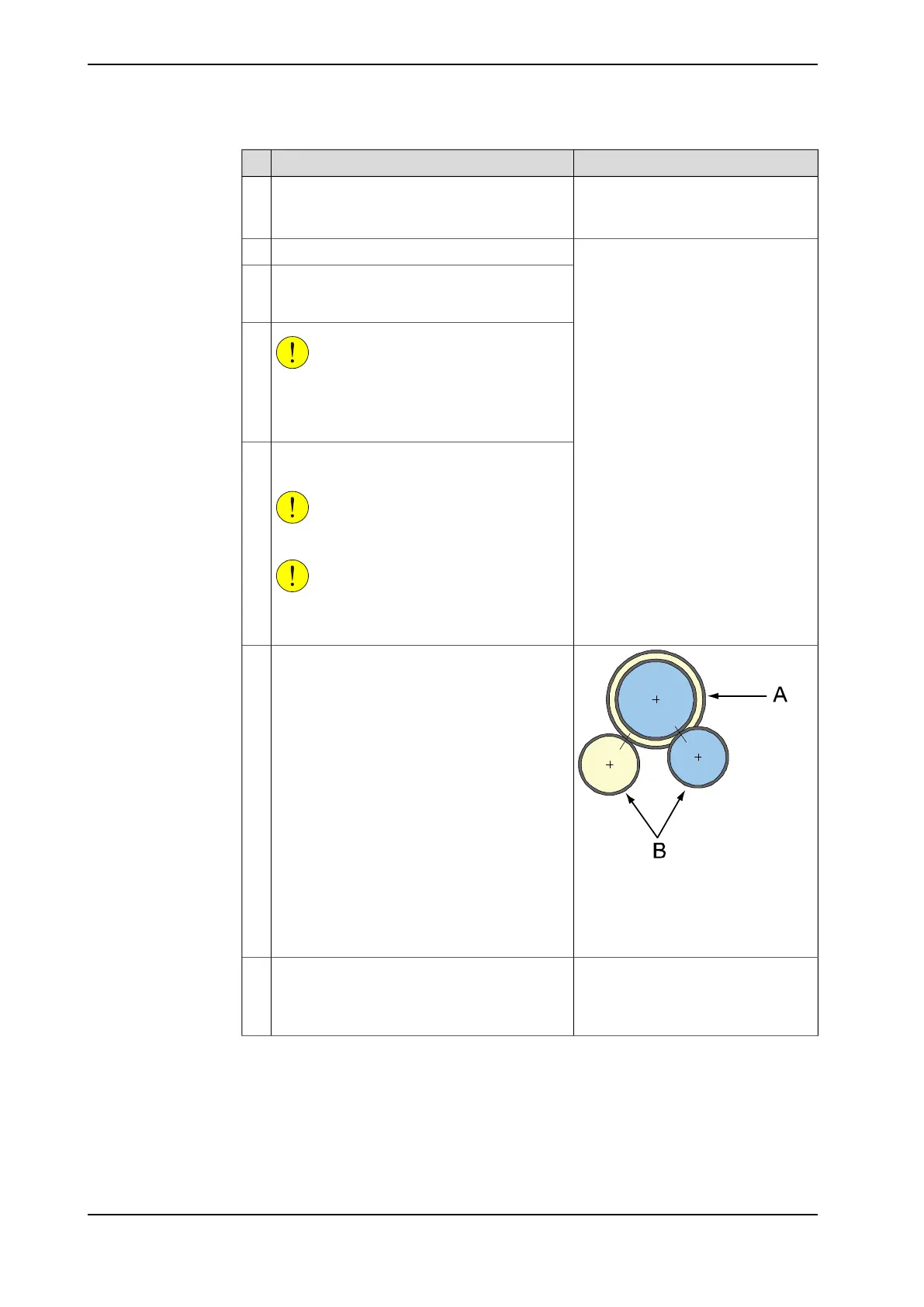
9
Parts:
• A: Gears on drive shaft unit,
axes 5-6
• B: Gears on the wrist
See the figure in
• Location of wrist unit on
page 262
Tightening torque: 35 Nm.
Secure the wrist unit with its attachment screws
and washers.
10
Continues on next page
266 Product manual - IRB 2600
3HAC035504-001 Revision: Q
© Copyright 2009-2018 ABB. All rights reserved.
4 Repair
4.4.3 Replacing wrist unit
Continued

 Loading...
Loading...





