Note/IllustrationAction
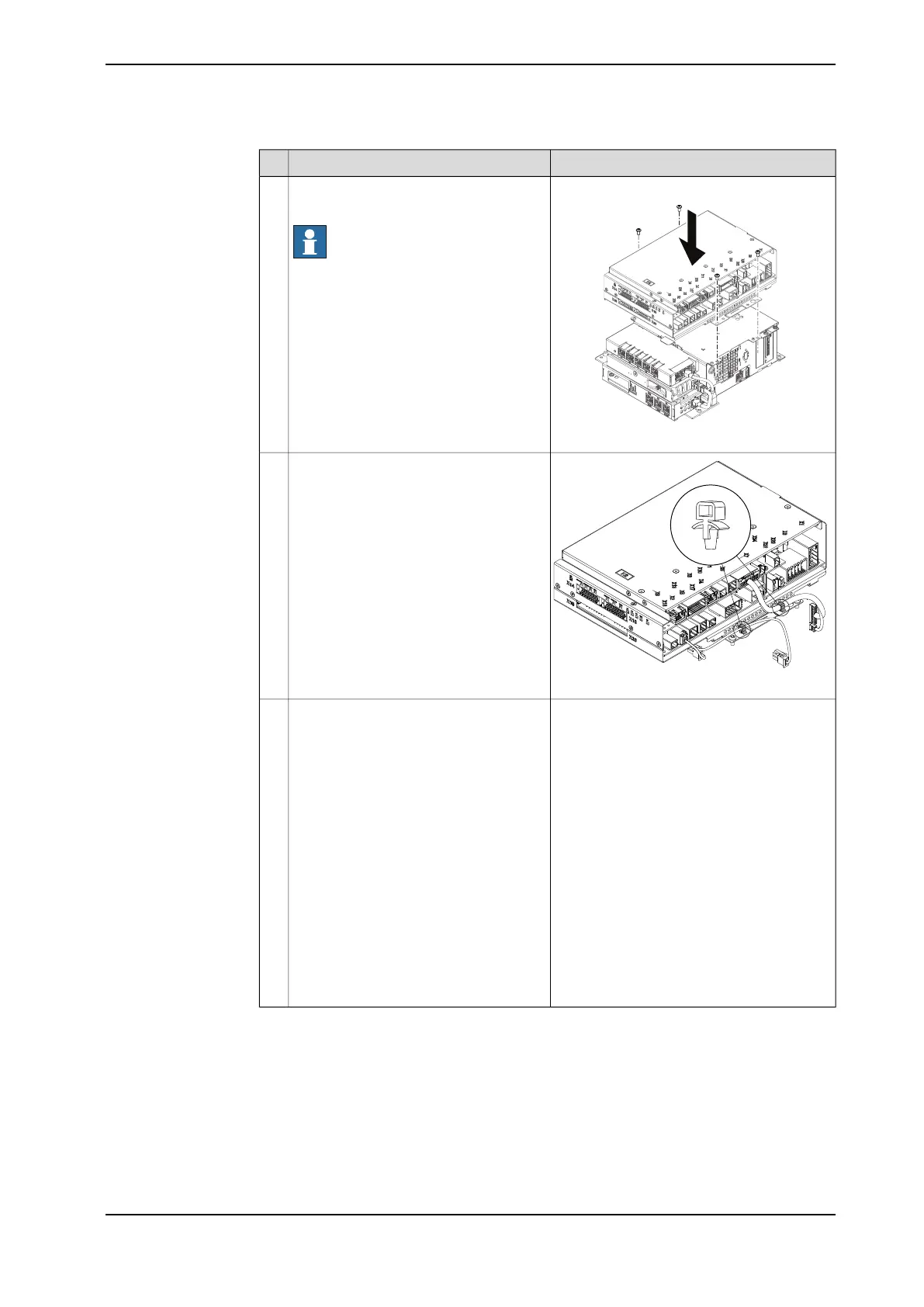
Screws: Torx pan head screw M4x8 (4 pcs)
xx1800000489
Fit the robot signal exchange proxy and
secure the screws.
Note
Avoid colliding with the frame of the
controller.
3
xx1800000971
Insert the cable ties into the locking
holes.
4
Reconnect:
• K2.X8 - A2.X6
• (option): K2.X2 - K4.X8, A2.X1
• K2.X12 - A2.K3.X6, A2.K3.X7
• K2.X10 - A1.X13
• K2.X21 - TempSensor
• K2.X4 - A1.X9
• K2.X3 - K6.X1, A2.K3.X1, K5.1.X4,
K7.X1
• K2.X1 - T2.X2
18
• K2.X1 - X107
19
• K2.X17 - G2.X1, G1.X2
• K2.X6, K2.X11 - A1.X2
• K2.X7, K2.X22 - Harn. LV robot
power (X1)
• K2.X9 & X13 - FlexPendant (X4)
5
18
Not available for CRB 15000 controller.
19
Only used for CRB 15000 controller.
Continues on next page
Product manual - OmniCore C30 287
3HAC060860-001 Revision: P
© Copyright 2019-2022 ABB. All rights reserved.
5 Repair
5.2.4 Replacing the robot signal exchange proxy
Continued