Note/IllustrationAction
xx1800000472
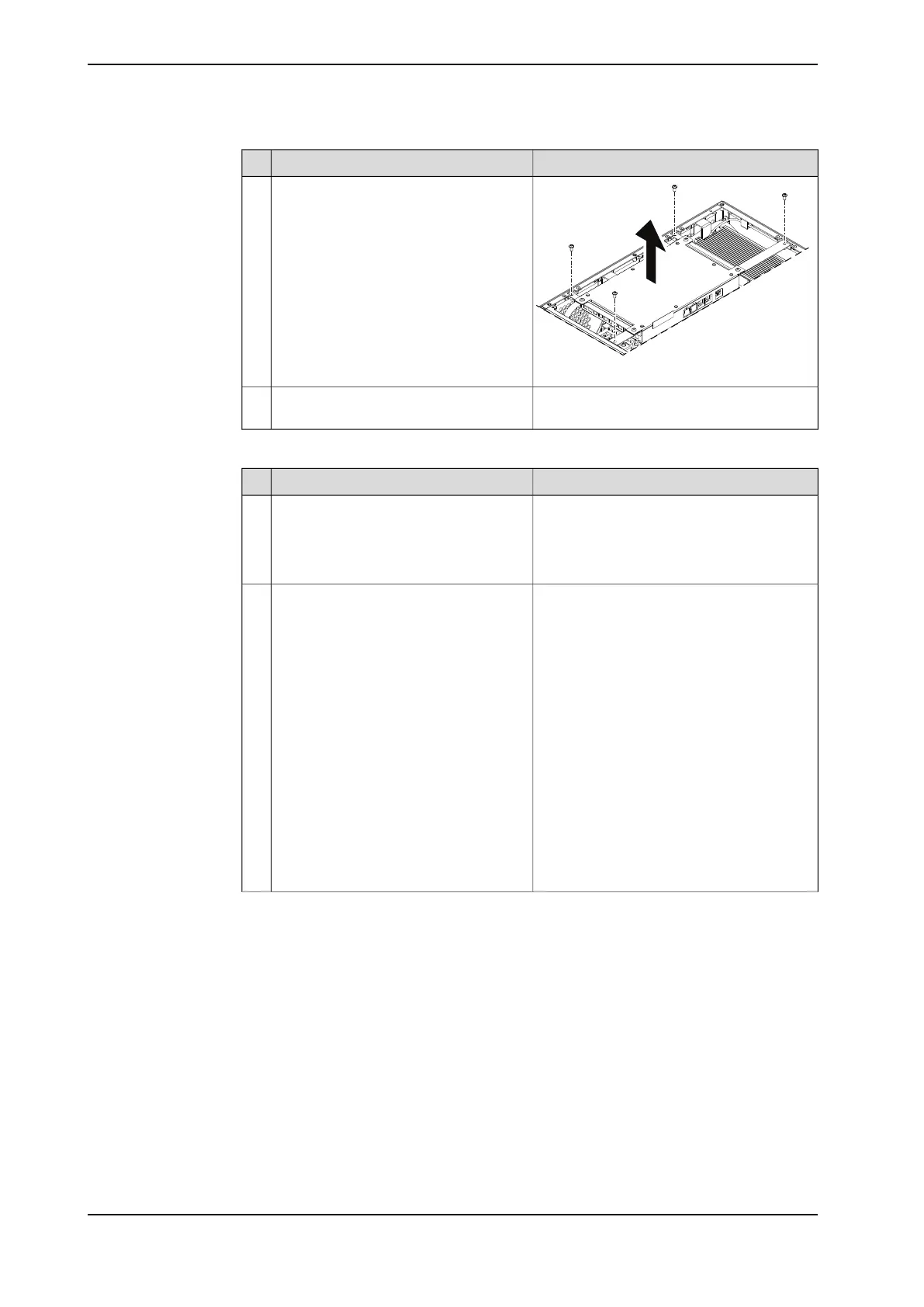
Remove the screws on the bracket.2
Loosen the screw and disconnect:
• K6.X4, K6.X5 - SMB.
3
Removing the main computer assembly with process plate
Note/IllustrationAction
Disconnect all the connectors on the as-
sembly group of the robot signal ex-
change proxy, Ethernet switch (option),
connected services gateway, scalable
I/O (option), and main computer.
1
For the robot signal exchange proxy:
• K2.X8 - A2.X6
• (option): K2.X2 - K4.X8, A2.X1
• K2.X12 - A2.K3.X6, A2.K3.X7
• K2.X10 - A1.X13
• K2.X21 - TempSensor
• K2.X4 - A1.X9
• K2.X3 - K6.X1, A2.K3.X1, K5.1.X4,
K7.X1
• K2.X1 - T2.X2
53
• K2.X1 - X107
54
• K2.X17 - G2.X1, G1.X2
• K2.X6, K2.X11 - A1.X2
• K2.X7, K2.X22 - Harn. LV robot
power (X1)
• K2.X9 & X13 - FlexPendant (X4)
53
Not available for CRB 15000 controller.
54
Only available for CRB 15000 controller.
Continues on next page
478 Product manual - OmniCore C30
3HAC060860-001 Revision: P
© Copyright 2019-2022 ABB. All rights reserved.
5 Repair
5.3.7 Replacing the IP20 power outlet connector
Continued
 Loading...
Loading...










