Appendix
0—Parameter
configuration normal
Bit1: Run sign
1—Running
0—Do not run
Bit2: Completion sign
1—Instruction
execution completed
0—Instruction
execution do not
completed
Bit3: Busy sign
1—Valid, the axis
occupied by other
instruction
0—Invalid, executing
instruction or
execution done.
Bit4: Reserved
Bit5: Find origin or not
1—Found origin
0—Not find origin
other parameters, it will
set to the nearest
reasonable value
automatically.
3 Report parameter
failure if TA=0 and the
maximum acceleration
is not set; TD the same
④ Explanation
The program detect each input by scanning (the Z phase is not affected by this), so when the
switch value changes and process not in time, there may be some delay. If the homing speed
(including search and close speed) is too high, the processing delay will be amplified, resulting in
inaccurate return.
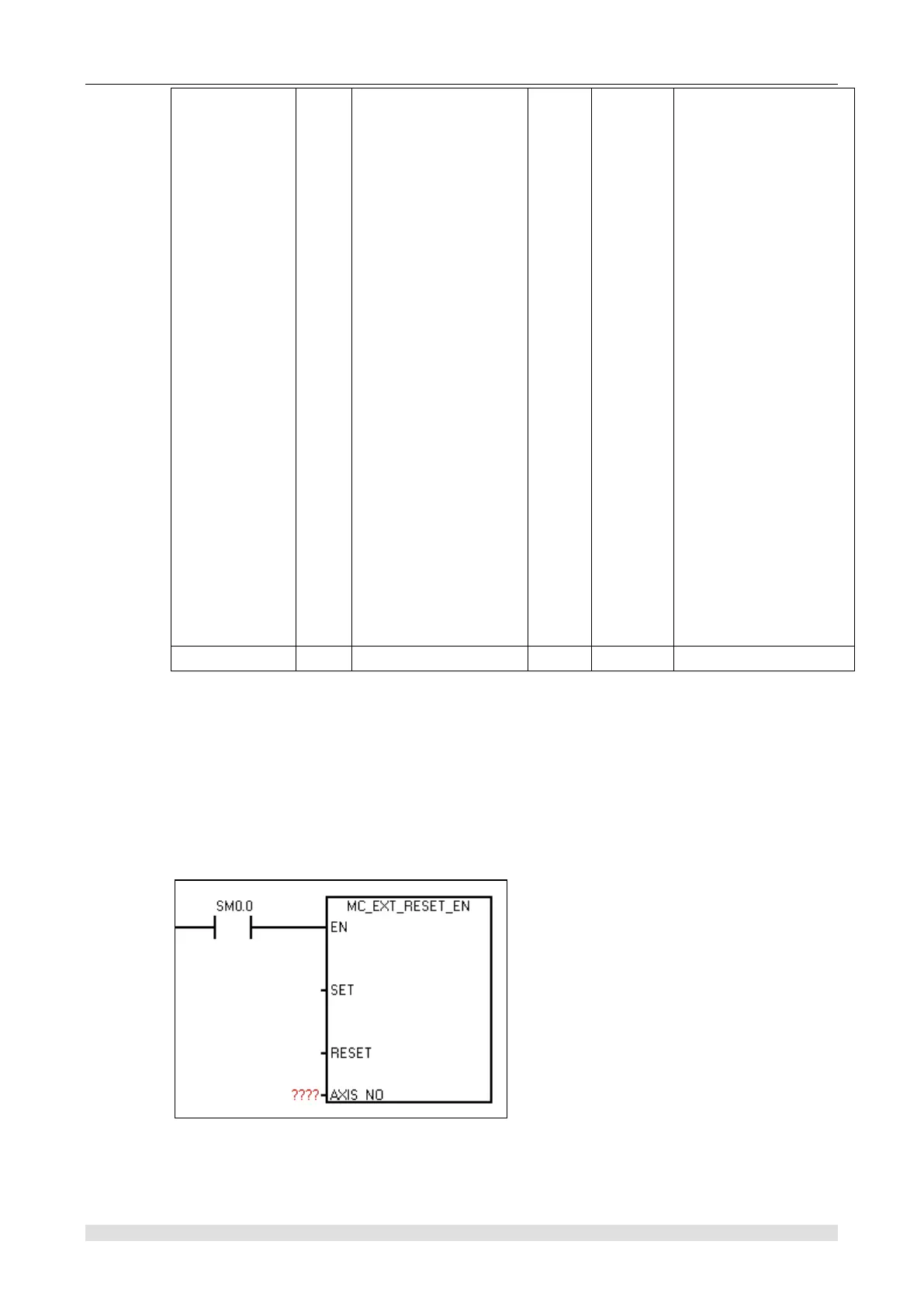
External reset coordinate enable instruction
① Function name: MC_EXT_RESET_EN
② Function: When call this instruction, set whether enable external IO reset absolute
coordinate value.
Note: The relationship between the axis number and external reset signal: