CTH200 Series PLC User Manual
The number of motion control module is only internally unified. If the PLC has 3
modules, among which module 0 and 2 is the motion control module, module 1 is not,
then module 0 is ID0, module 1 is uncontrollable for it is not motion control module,
and module 2 is ID1.
If a single motion control module is attached behind the CPU, the delay from enable
to execution of the output instruction is about 780us due to transmission delay. If
there are up to 5 motion control modules hanging behind the CPU, the delay is about
930us.
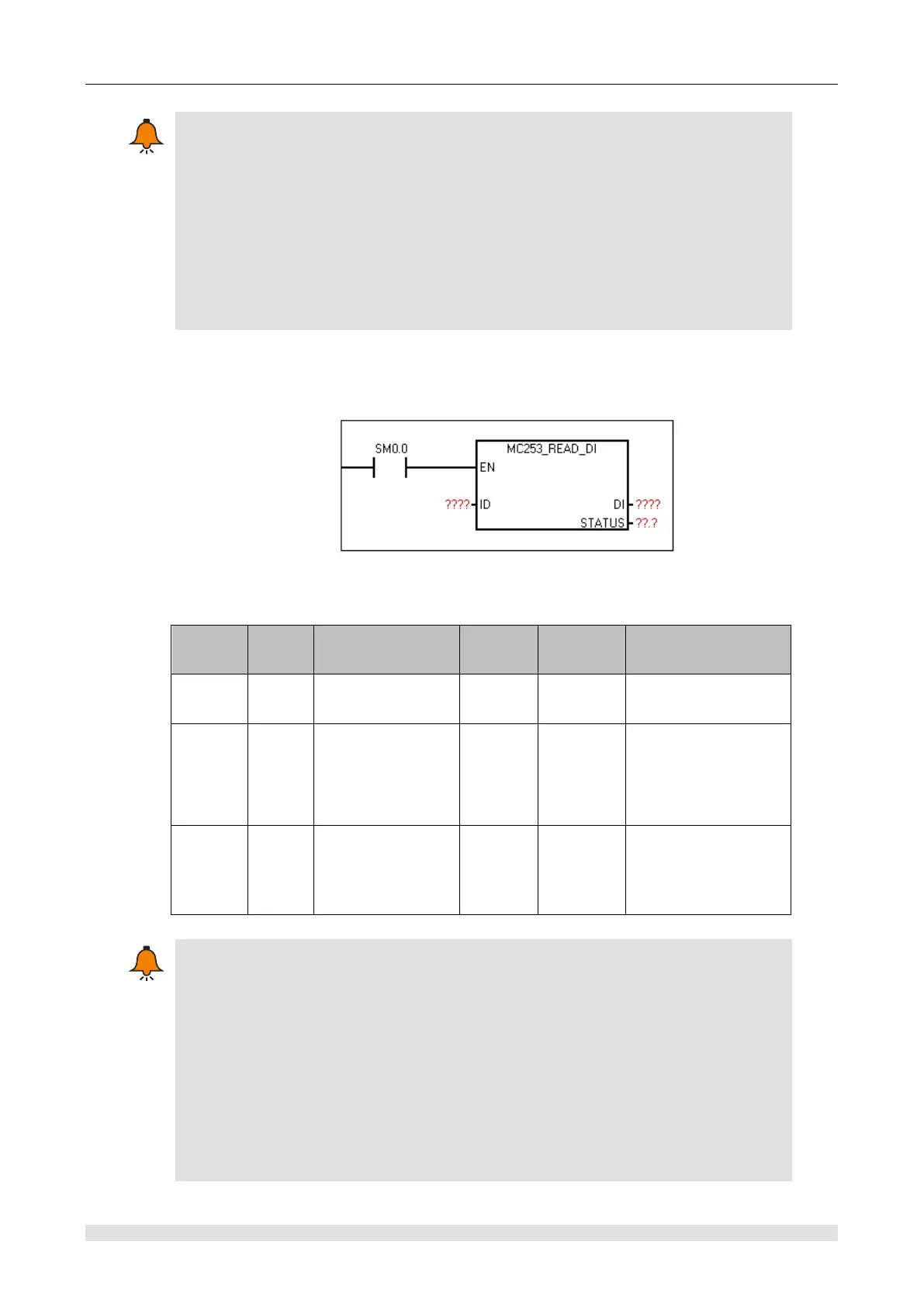
Read modules input status instruction
① Function name: MC253_READ_DI
② Function: Read input of motion control module
③ Parameter
Motion control
module ID number
Apply only to motion
control module
DI corresponds to 8 I
input, low byte
corresponds to I low
bit, such as DI bit0
corresponds to I0.0
Communication
status sign
The number of motion control module is only internally unified. If the PLC has 3
modules, among which module 0 and 2 is the motion control module, module 1 is not,
then module 0 is ID0, module 1 is uncontrollable for it is not motion control module,
and module 2 is ID1.
When an axis call motion control instruction, if confirm to operating conditions, the
running process of the axis port output pulse or direction according to the instruction
(corresponding port is not controlled by the MC253_DO_CTRL), the port can restore
normal IO functions after run (accept instruction MC253_DO_CTRL control); use
instruction MC253_DO_CTRL carefully so as not to affect the use of motion control.