Appendix
Initialize motion control module instruction
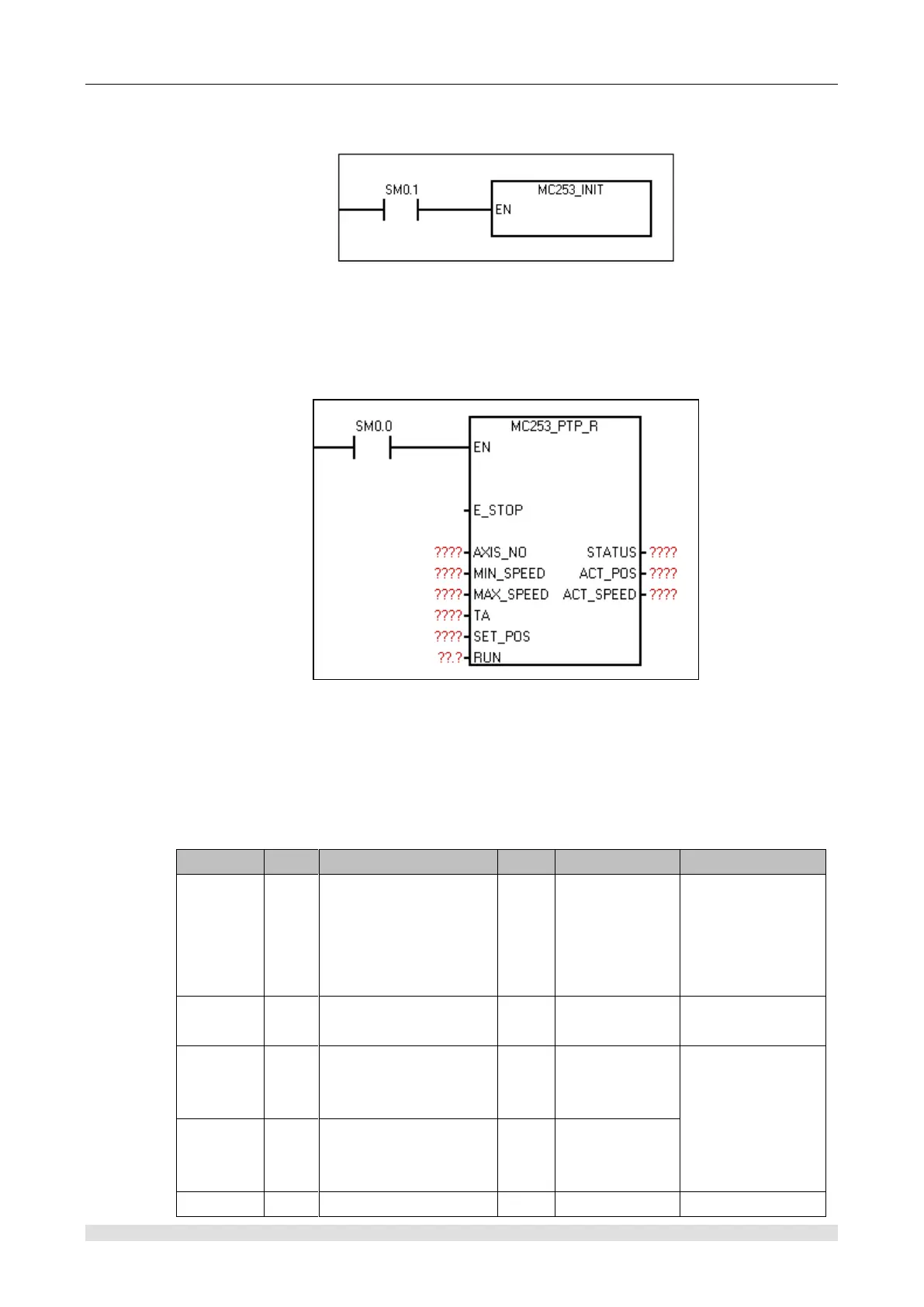
① Function name: MC253_INIT
② Function: Initialize the system control variable of motion control module
③ Parameter: NONE
Uniaxial relative motion instruction
① Function name: MC253_PTP_R
② Function: Used for uniaxial point - to - point control (uniaxial fixed - length drive). Call one
time output fixed pulse, by setting the maximum, minimum speed and deceleration time,
the output pulse will gradually accelerate to the largest speed, when the pulse number is
ready to run, cut down pulse frequency automatically to prevent vibration or jammed due to
too much inertia when start or stop the machine.
③ Parameter
1 Run only when
Run =1 and
E_Stop =0
2 RUN reset
internal when
E_STOP = 1
Unchangeable in
the process
Minimum speed of run
or stop.
1 Set minimum
speed less than
maximum speed
2 Changeable in
the process