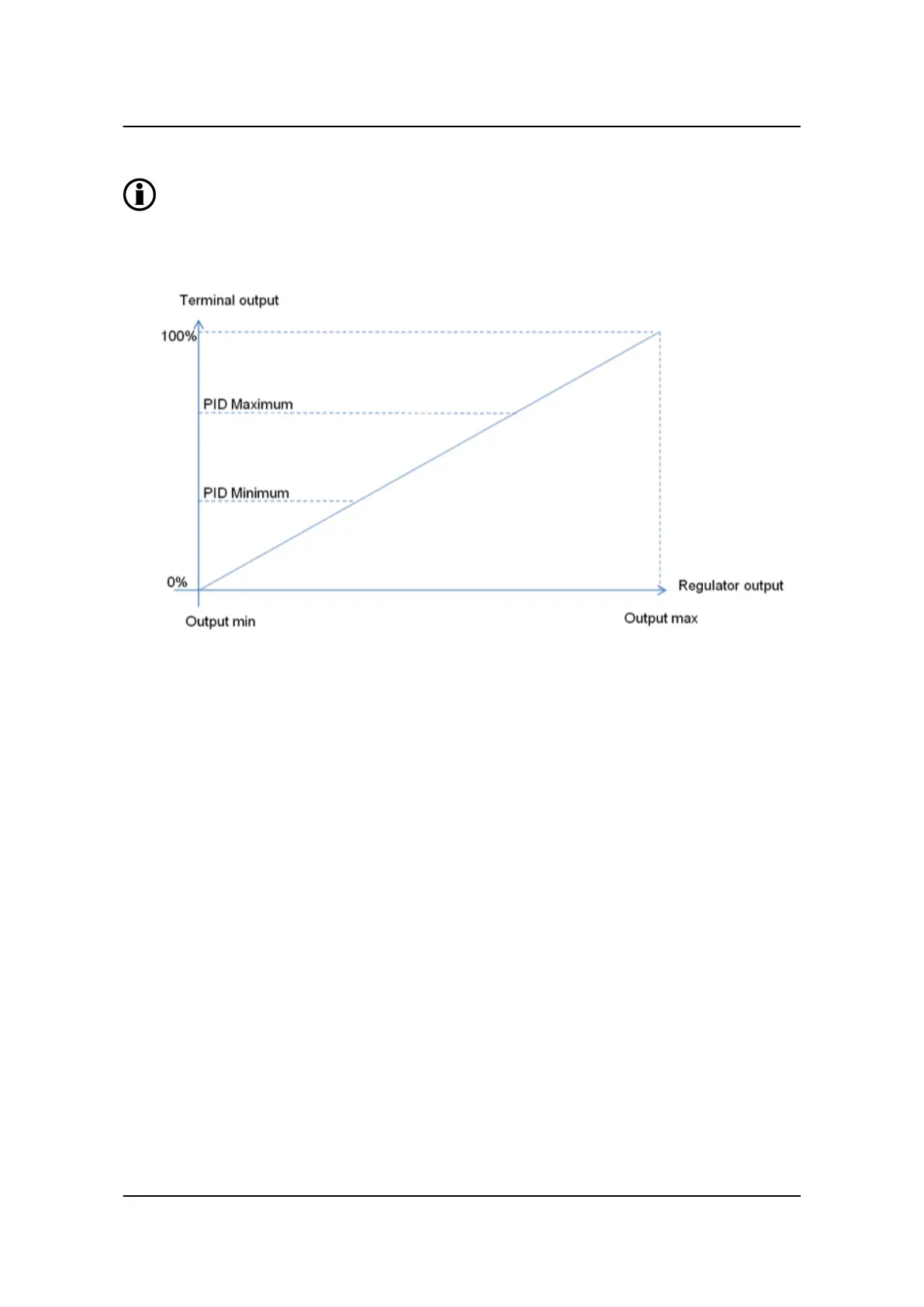
If the range is limited by these parameters, note that the resolution of the limited scale is not
improved. The output resolution will remain unchanged and will only work inside the limited
range.
It is not possible for the regulator to output a value outside the limited range.
Inverse functionality is used if the hardware is wired up in reverse or if for example an engine has to speed
up, to make a lower pressure of some kind. The functionality of the maximum-minimum range is still the same
when the inverse functionality is used.
The inverse functionality can only be found in M-Logic as an M-Logic command. For PID1 the command is
called PID1 Temporary Inverse. Similar commands exist for PID2 and PID3.
9.1.9 Idle run
If the AGC 110 is used to regulate an engine and it is desired to use idle run for the engine, PID1 can be
useful.
For the idle run to work, the closed loop must be set up, an MPU or a CAN bus between the governor and
CAN bus H5 EIC must be connected. Next, the idle run rpm must be set up in parameter 6173. Parameter
6173 is the running detection level, and idle run will use the running detection level + 20 % as the temporary
reference set point.
The M-Logic command, PID1 Idle Run Speed Control, must be set as long as the engine is in idle run. This
will cause the regulator (Auto regulation mode) to aim for the running detection level + 20 % as long as the
idle run mode is active. The M-Logic command is explained in the document "ML-2 application notes M-Log-
ic".
AGC 100 Designer's Reference Handbook
4189340766 UK
PID controller (AGC 110 only)
DEIF A/S Page 151 of 152
 Loading...
Loading...










