6 Positioning mode
126 Festo – GDCP-CMMS/D-FW-EN – 1404NH – English
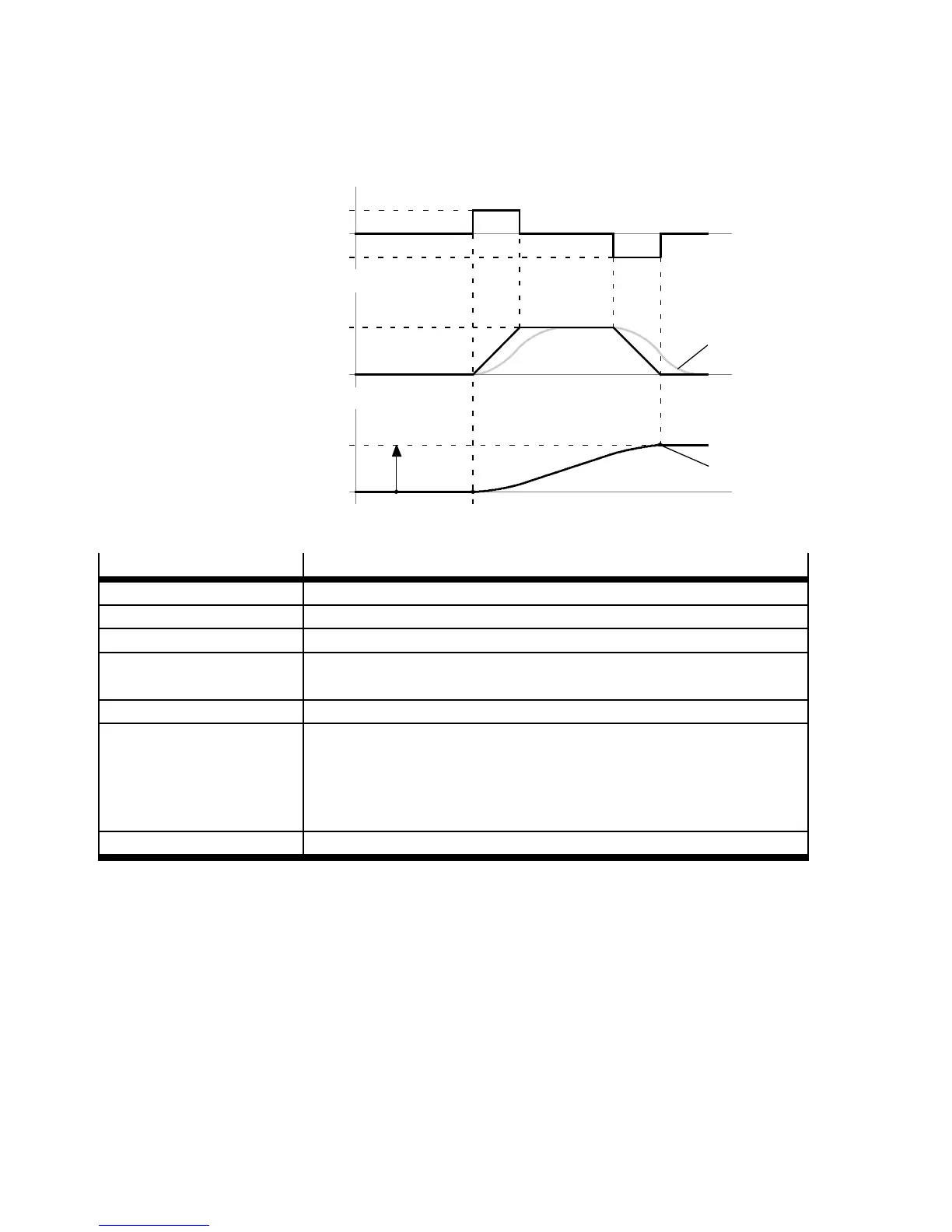
Parameters: Position, acceleration, deceleration, velocity, mode, command (END) and smoothing
The diagram shows the parameters for point-to-point positioning and the “smoothing” option.
t
t
a+
v
a–
v
N
t
s
Pos
END
Mod
k
a
Start
Parameter Description
a+ Acceleration Setpoint value for acceleration.
a– Deceleration Setpoint value for deceleration.
v
N
Velocity Setpoint value for speed.
k
a
Smooth Value for duration of filtering from acceleration and deceleration ramp
page 130.
Pos Position Setpoint value for the relative or absolute position.
Mod Mode Selection of a relative or absolute positioning mode page 128:
A = Absolute positioning related to a fixed zero point (axes/project
zero point) (default)
RA = Relative positioning related to the current actual position
RN = Relative positioning related to the current setpoint position
END Command The individual record is ended upon reaching the position.
Tab. 6.6 Parameters: Position, acceleration, deceleration, velocity, mode, c ommand (END) and
smoothing
 Loading...
Loading...









