6 Positioning mode
Festo – GDCP-CMMS/D-FW-EN – 1404NH – Engli sh 147
Parameter: Command “TIM” and time
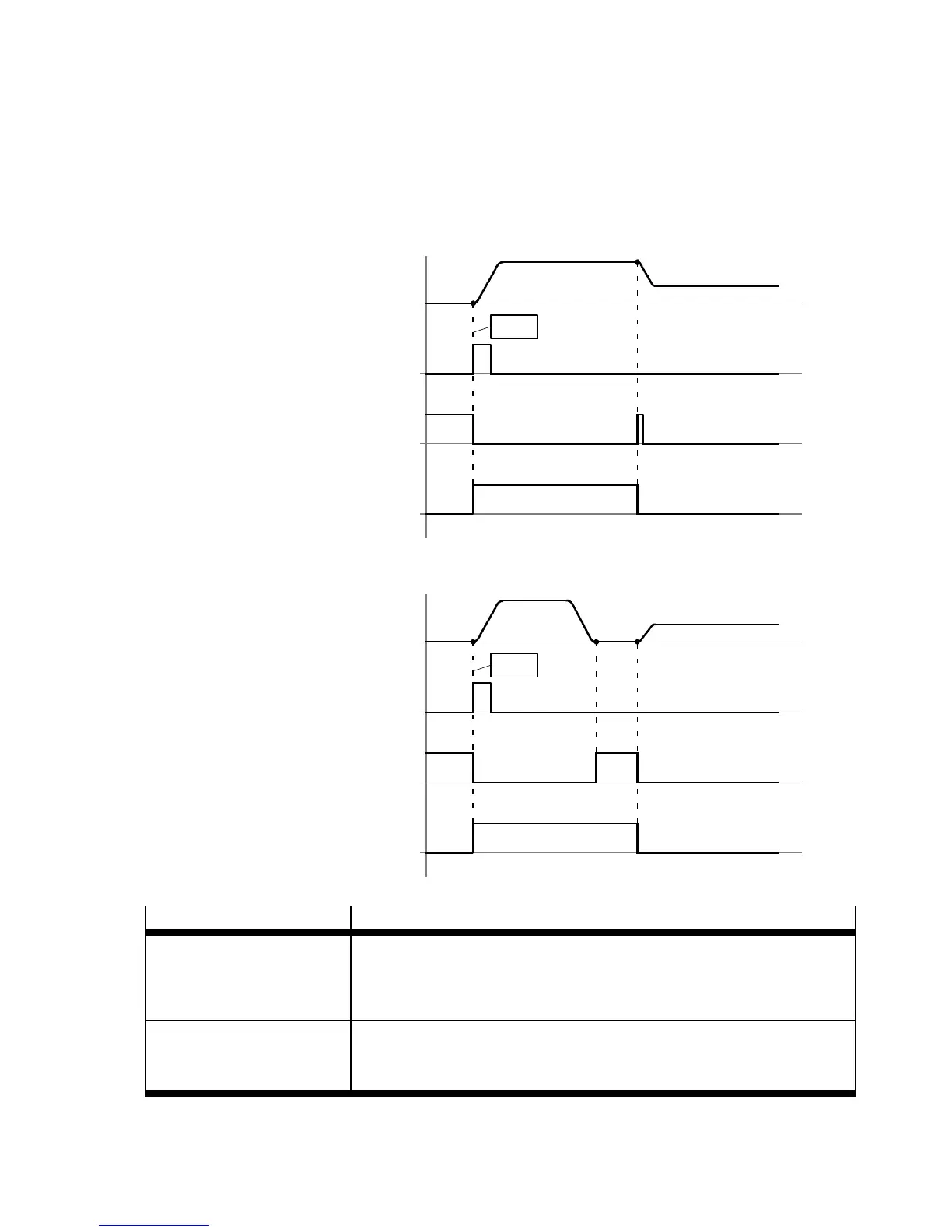
The diagrams show record continuation via the parameter “Command: TIM (time)” as a function of the
parameter “Time”. Continuation during a current positioning process and continuation after a closed
positioning process are shown here by way of example.
1. Behaviour in the event of positioning time > time “TIM”.
t
t
t
Parameter “Time”
Speed
TIM
Motion Complete ( MC)
(controller-internal)
t
Star t record sequence
(DIN8)[X1.23]
1. Behaviour in the event of positioning time < time “TIM”.
t
t
t
Parameter “Time”
Speed
TIM
Motion Complete ( MC)
(controller-internal)
t
Star t record sequence
(DIN8)[X1.23]
Parameter
Description
Command TIM = Continuation after expiration of the time.
Continuation takes place if the parametrised time (positioning
record prof ile parameter) h as expired. Measurement of the time
starts when the position set starts.
Time Setpoint value for the time until the continuation is exec uted.
The parameter is activated via the positioning record profile parameter
“Command: TIM”.
Tab. 6.1 9 Parameter: Command “TIM” and time
 Loading...
Loading...









