B. Basic controlling principles
B−48
Festo P.BE−CPX−CMA X−CONTROL−EN en 0908NH
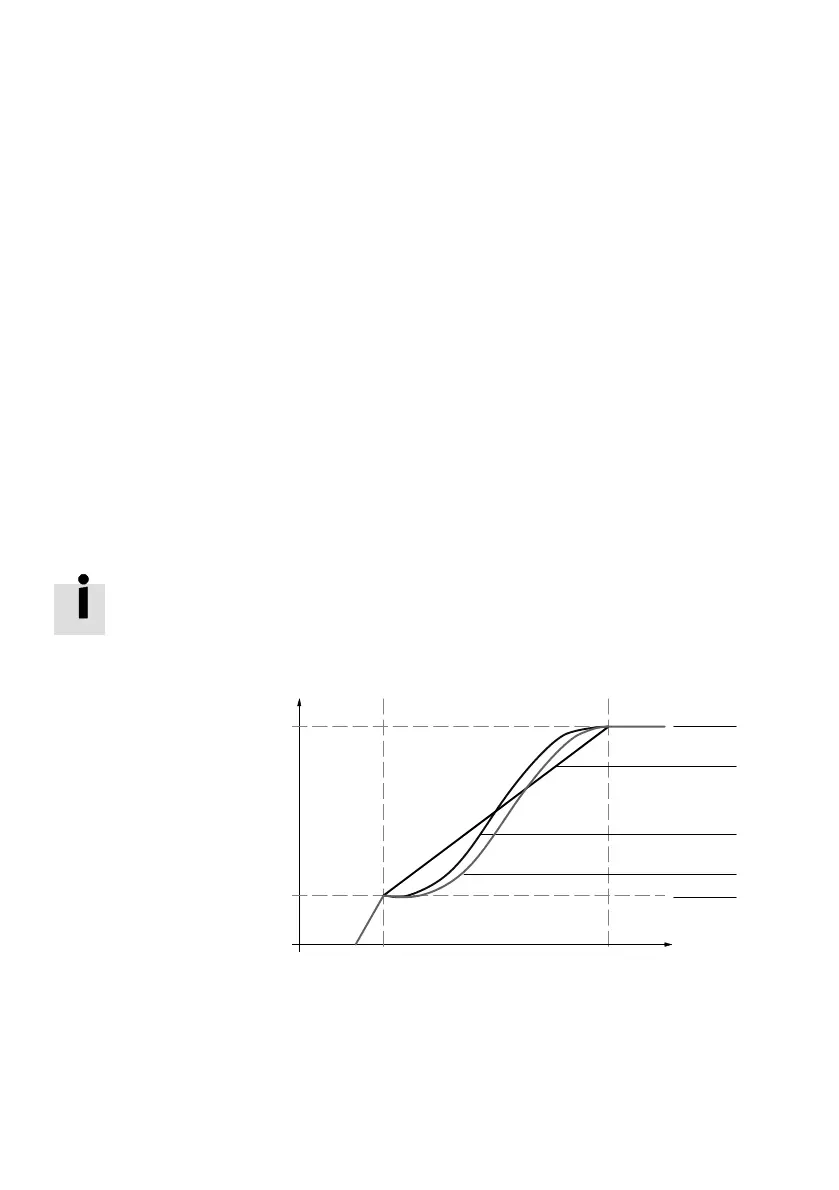
B.8.7 Force ramp
When a force task starts, calculation of a ramp−shaped signal
is started as the basis of the force control setpoint specifica
tion. This signal begins with the actual force at the start of the
force task and runs linearly to the pitch of the force ramp up
to the desired force setpoint value.
A constantly differentiable force setpoint value is an advan
tage for optimisation of the controller behaviour, which is why
the force ramp is replaced with a sin
2
function which runs
through the same force stroke within the same time. Since
the sin
2
function starts and ends its course with the pitch 0,
this results in a higher maximum pitch than with the force
ramp. The maximum pitch of the sin
2
function is at the turn
ing point, and it is larger by Pi/2 there than at the force ramp.
When moving to a stop or a facility that generates the corre
sponding counteracting force, the setpoint force is possibly
reached immediately. In this case, force build−up with the
force ramp can therefore not
occur.
1 Setpoint force final
value
2 Setpoint force ramp
3 Setpoint force,
smoothed with sin
2
4 Actual force
5 Start value
Force [N]
1
2
3
4
5
Time [s]
Fig.B/4: Force ramp

 Loading...
Loading...











