5.4 Details of Function Codes
5-114
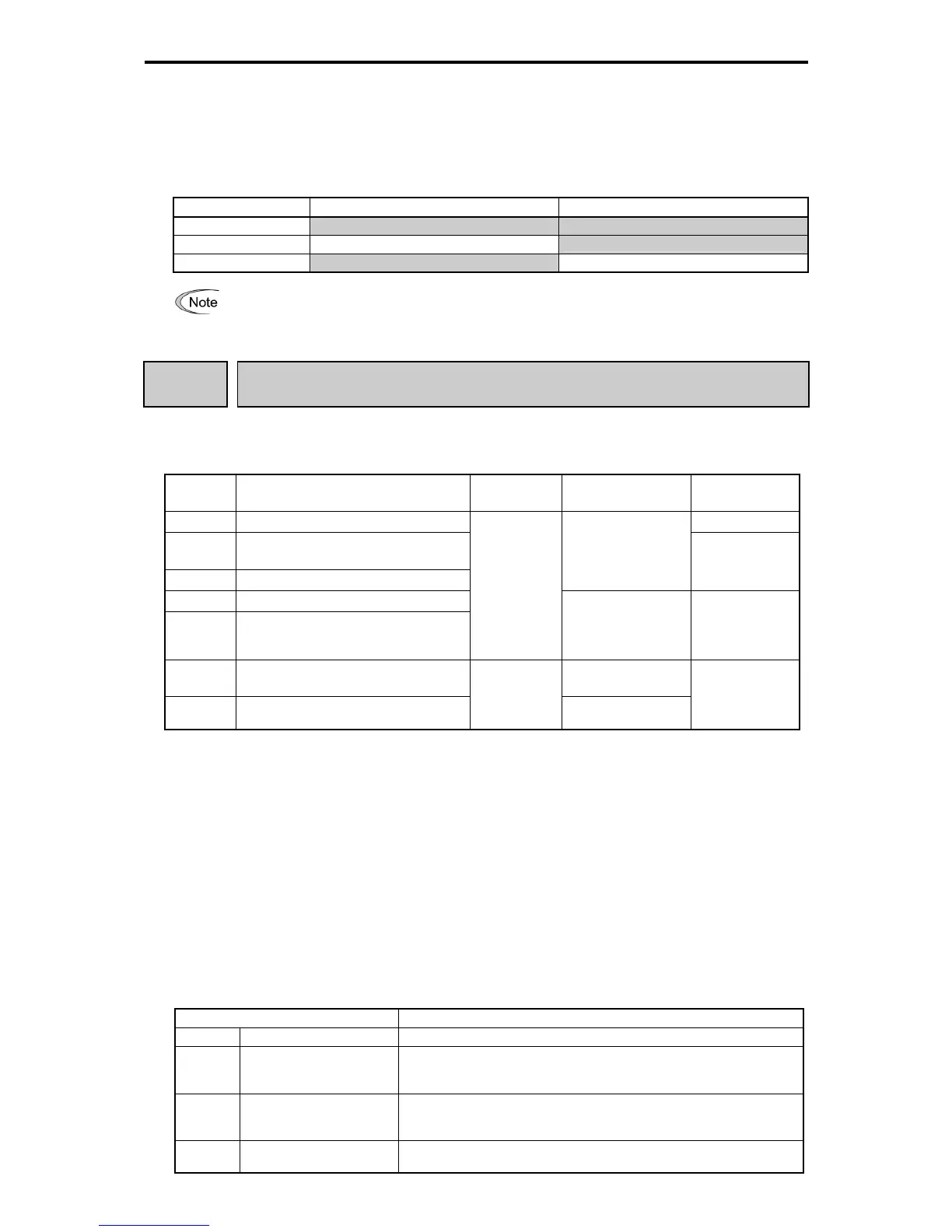
Torque limiter (Operating conditions) (H73)
H73 specifies whether the torque limiter is enabled or disabled during acceleration/ deceleration and running
at constant speed.
Table 5.4-52
Data for H73 During accelerating/decelerating During running at constant speed
0 Enable Enable
1 Disable Enable
2 Enable Disable
The torque limiter and current limiter are very similar in function. If both are activated concurrently,
they may conflict with each other and cause hunting. Avoid concurrent activation of these limiters.
F42
Drive Control Selection 1 Related function code: H68 (Slip Compensation 1,
Operating conditions)
F42 specifies the motor drive control.
Table 5.4-53
Data for
F42
Drive control Basic control Speed feedback Speed control
0 V/f control with slip compensation inactive Frequency control
1
Dynamic torque vector control (with slip
compensation and auto torque boost)
2 V/f control with slip compensation active
Disable
Frequency control
with slip
compensation
3 V/f control with speed senso
Vector control
Enable
Speed control
with automatic
speed regulator
(ASR)
V/f control with slip compensation inactive
Under this control, the inverter controls a motor with the voltage and frequency according to the V/f pattern
specified by function codes. This control disables all automatically controlled features such as the slip
compensation, so no unpredictable output fluctuation occurs, enabling stable operation with constant output
frequency.
V/f control with slip compensation active
Applying any load to an induction motor causes a rotational slip due to the motor characteristics, decreasing
the motor rotation. The inverter’s slip compensation function first presumes the slip value of the motor based
on the motor torque generated and raises the output frequency to compensate for the decrease in motor
rotation. This prevents the motor from decreasing the rotation due to the slip.
That is, this function is effective for improving the motor speed control accuracy.
Table 5.4-54
Function Code Enable
P12 Rated slip frequency Specify the rated slip frequency.
P09 Slip compensation gain for
driving
Adjust the slip compensation amount for driving.
Slip compensation amount for driving = Rated slip x Slip compensation
gain for driving
P11 Slip compensation gain for
braking
Adjust the slip compensation amount for braking.
Slip compensation amount for braking = Rated slip x Slip
compensation gain for braking
P10 Slip compensation
response time
Specify the slip compensation response time. Basically, there is no need
to modify the setting.

 Loading...
Loading...








