5.4 Details of Function Codes
5-190
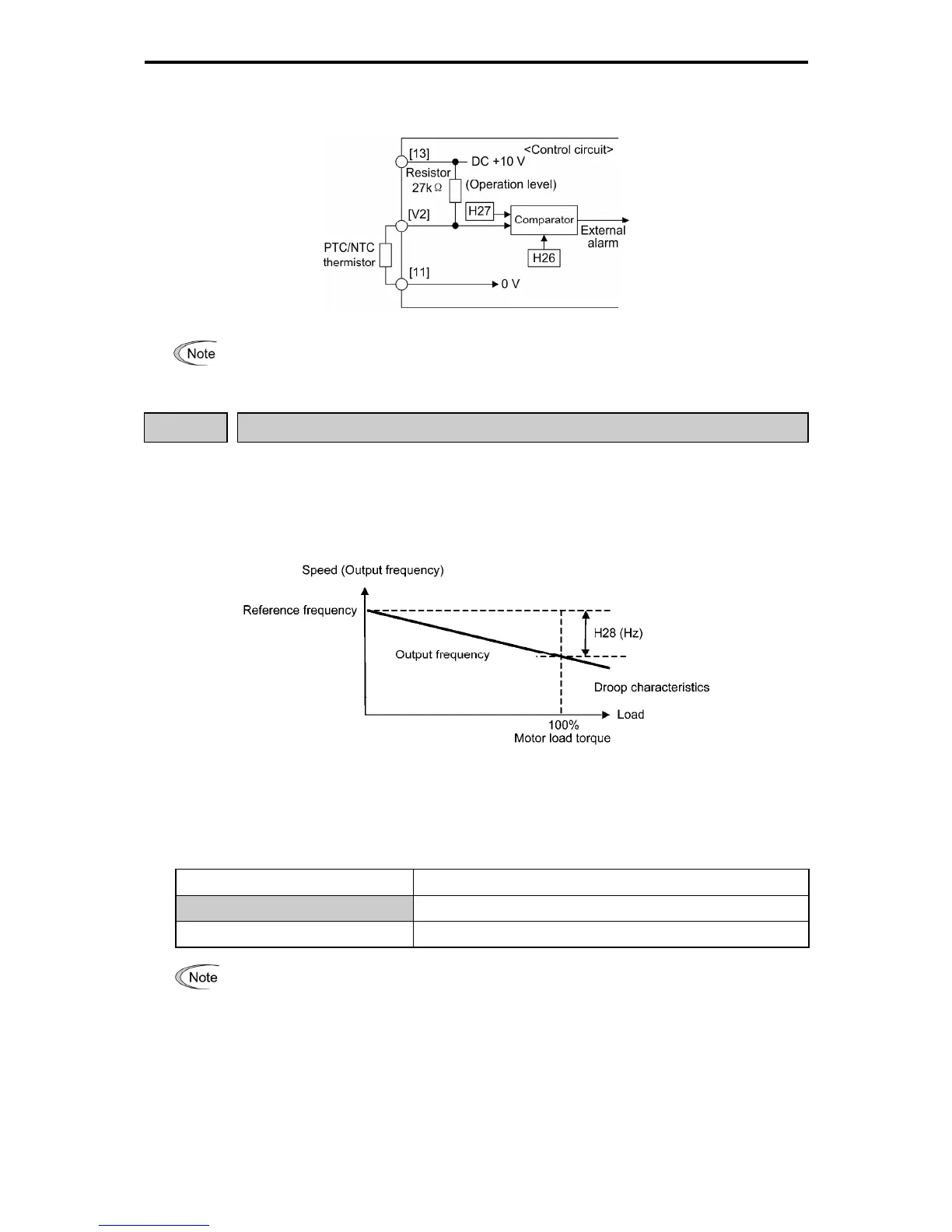
Connect the PTC thermistor as shown below. The voltage obtained by dividing the input voltage on terminal [V2]
with a set of internal resistors is compared with the set detection level voltage (H27).
Fig. 5.4-85
When using the terminal [V2] for PTC/NTC thermistor input, also turn SW5 on the control printed
circuit board to the PTC/NTC side. For details, see Chapter 12, "SPECIFICATIONS."
H28
Droop Control
In a system in which two or more motors drive single machinery, any speed gap between inverter-driven
motors results in some load unbalance between motors. Droop control allows each inverter to drive the
motor with the speed droop characteristics for increasing its load, eliminating such kind of load unbalance.
- Data setting range: -60.0 to 0.0 (Hz), (0.0: Droop disabled)
Fig. 5.4-86
Select droop DROOP (Function code E01 to E09, data = 76)
Switching between enable/disable of the droop control is possible.
Table 5.4-123
Input signal
DROOP Droop control
ON Valid
OFF Invalid
To use droop control, be sure to auto-tune the inverter for the motor.
Under V/f control, to prevent the inverter from tripping even at an abrupt change in load, droop
control applies the acceleration/deceleration time to the frequency obtained as a result of droop
control. This may delay reflection of the frequency compensated during droop control on the moto
speed, thereby running the inverter as if droop control is disabled.
By contrast, under vector control with/without speed sensor, the current control system works so
that the inverter does not trip even at an abrupt change in load. No acceleration/deceleration time
is applied to the frequency obtained as a result of droop control. It is, therefore, possible to balance
the load even during acceleration/deceleration by using droop control.

 Loading...
Loading...








