10.1 Selecting Motors and Inverters
10-6
(3) Calculating the deceleration time (For detailed calculation, refer to Section 10.1.3 [2])
To calculate the deceleration time, check the motor deceleration torque characteristics for the whole
range of speed in the same way as for the acceleration time.
1) Calculate the moment of inertia for the load and motor
Same as for the acceleration time.
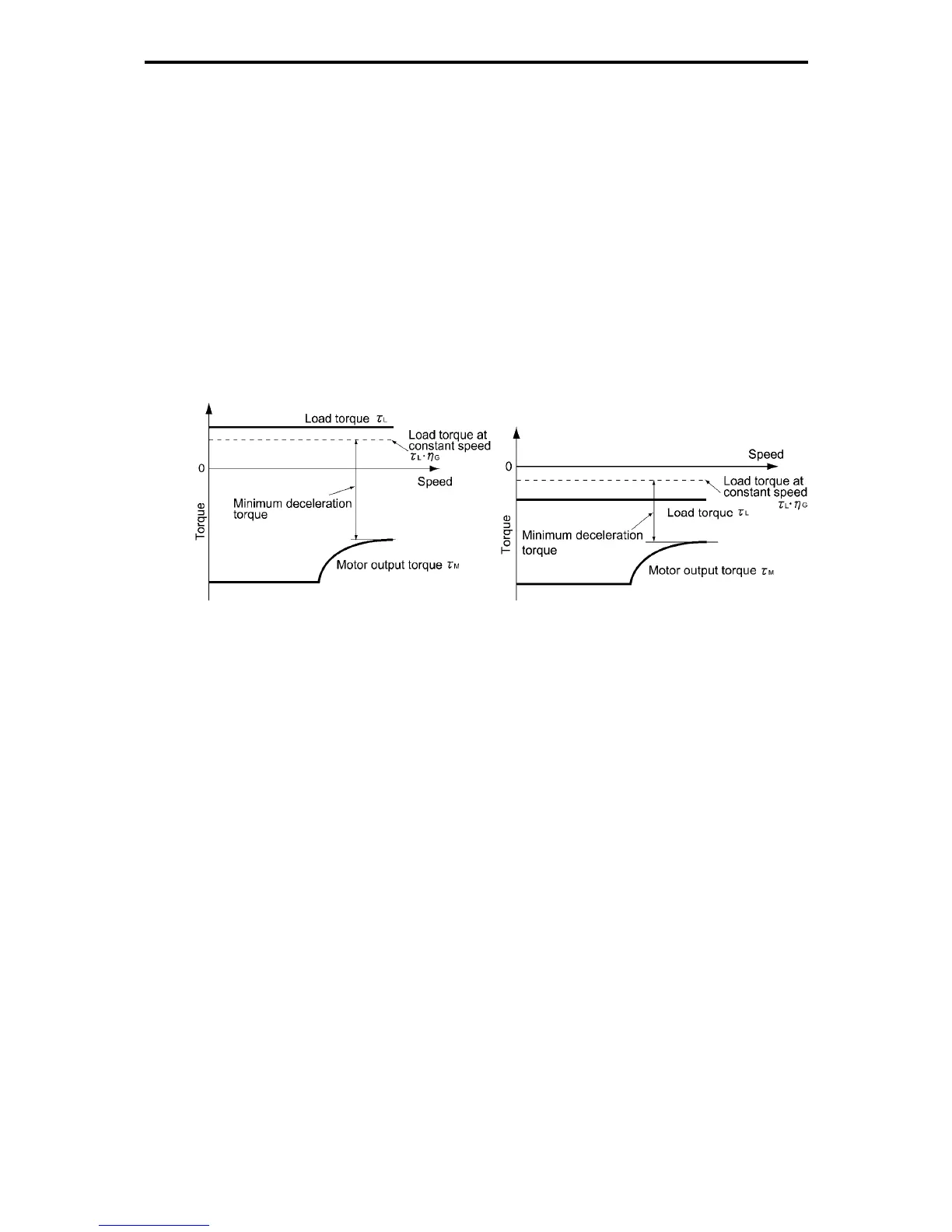
2) Calculate the minimum deceleration torque (See Figure 10.1-5 and Figure 10.1-6)
Same as for the deceleration time.
3) Calculate the deceleration time
Assign the value calculated above to the equation (10.16) to calculate the deceleration time in
the same way as for the acceleration time. If the calculated deceleration time is longer than the
requested time, select the inverter and motor having one class larger capacity and calculate it
again.
(4) Braking resistor rating (For detailed calculation, refer to Section 10.1.3 [3])
Braking resistor rating is classified into two types according to the braking periodic duty cycle.
1) When the periodic duty cycle is 100 sec or less:
Calculate the average loss to determine rated values.
2) When the periodic duty cycle exceeds 100 sec:
The allowable braking energy depends on the maximum regenerative braking capacity. The
allowable values are listed in Chapter 11, Section 11.4.1 [1] "Braking resistors (DBRs) and
braking units."
(5) Motor RMS current (For detailed calculation, refer to Section 10.1.3 [4])
In metal processing machine and materials handling machines requiring positioning control, highly
frequent running for a short time is repeated. In this case, calculate the maximum equivalent RMS
current value (effective value of current) not to exceed the allowable value (rated current) for the
motor.
Figure 10.1-5 Example Study of Minimum
Deceleration Torque (1)
Figure 10.1-6 Example Study of Minimum
Deceleration Torque (2)

 Loading...
Loading...








