11.4 Option
11-71
Chapter 11 SELECTING PERIPHERAL EQUIPMENT
Control mode
Speed control (Vector control with speed sensor, V/f control with speed sensor, and Dynamic torque vector
control with speed sensor)
To control the motor speed, the inverter equipped with this interface card detects feedback signals sent
from the PG (pulse generator) mounted on the motor output shaft, enabling high-accuracy and
high-response speed control.
(A recommended motor for this control is a FUJI VG motor exclusively designed for vector control.)
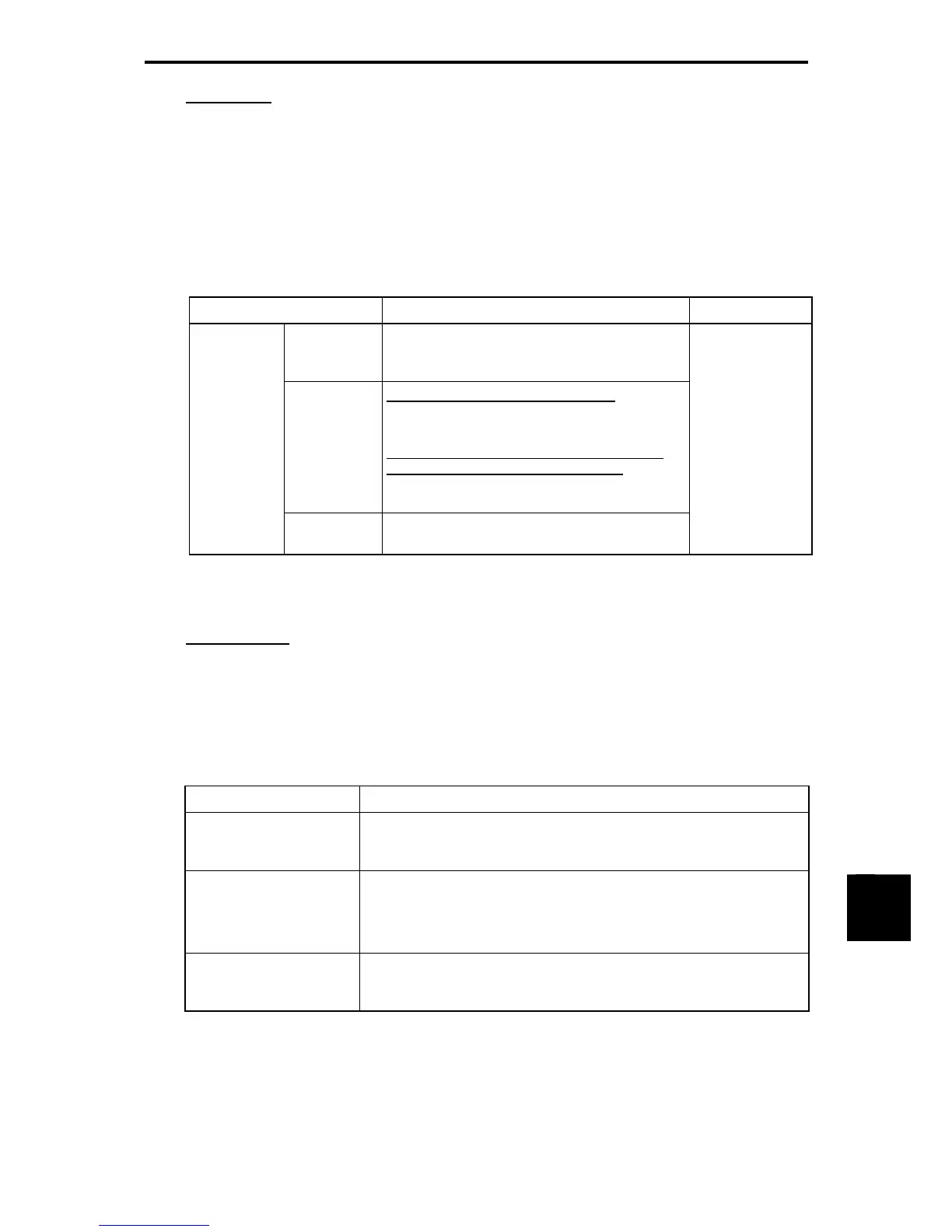
Table 11.4-37
Item Specifications Remarks
Maximum
output
frequency
25 to 200 Hz
Speed control
range
Under vector control with speed sensor
Minimum speed : Base speed = 1 : 1500
(For 4-pole motors, 1 to 1500 r/min
)
Under V/f control with speed sensor or dynamic
torque vector control with speed sensor
Minimum speed : Base speed = 1 : 100
(For 4-pole motors, 15 to 1500 r/min)
Control
specifications
*1
Speed control
accuracy
Within ±0.2% of the rated speed (25±10°C)
When a VG motor
(1024 P/R) is
connected.
*1
The controllability values specified here greatly vary depending on the pulse resolution, P/R
(Pulses/Revolution). The recommended P/R is 1024 or more.
Pulse train input
This function gives a frequency command to the inverter in pulse train format. Available formats are three
types of a pulse train input with its sign/pulse train input, run forward/run reverse pulse train, and 90
degree phase shifted A/B pulse trains. Use terminals [XA] and [XB] for the pulse train frequency command
input.
Table 11.4-38
Pulse train format Operation overview
Pulse train sign/
pulse train input
Gives the speed command to the inverter, following the pulse train input
frequency on the terminal [XB]. Switching the terminal [XA] ON/OFF
determines polarity of the speed command.
*1
Run forward/
run reverse pulse
Gives the run forward speed command to the inverter, following the
pulse train input frequency on the terminal [XB], if any.
Gives the run reverse speed command to the inverter, following the
pulse train input frequency on the terminal [XA], if any.
*1
90 degree phase shifted
A/B pulse trains
Gives the speed command with polarity to the inverter, following 90
degree phase shift and frequency information of two pulse inputs on
terminals [XA] and [XB].*1
*1
Actual rotation direction of the motor is specified by a combination of the pulse train input command
polarity and FWD/REV command in the inverter.
For details, refer to the PG Interface Card Instruction Manual (SI47-1215).

 Loading...
Loading...








