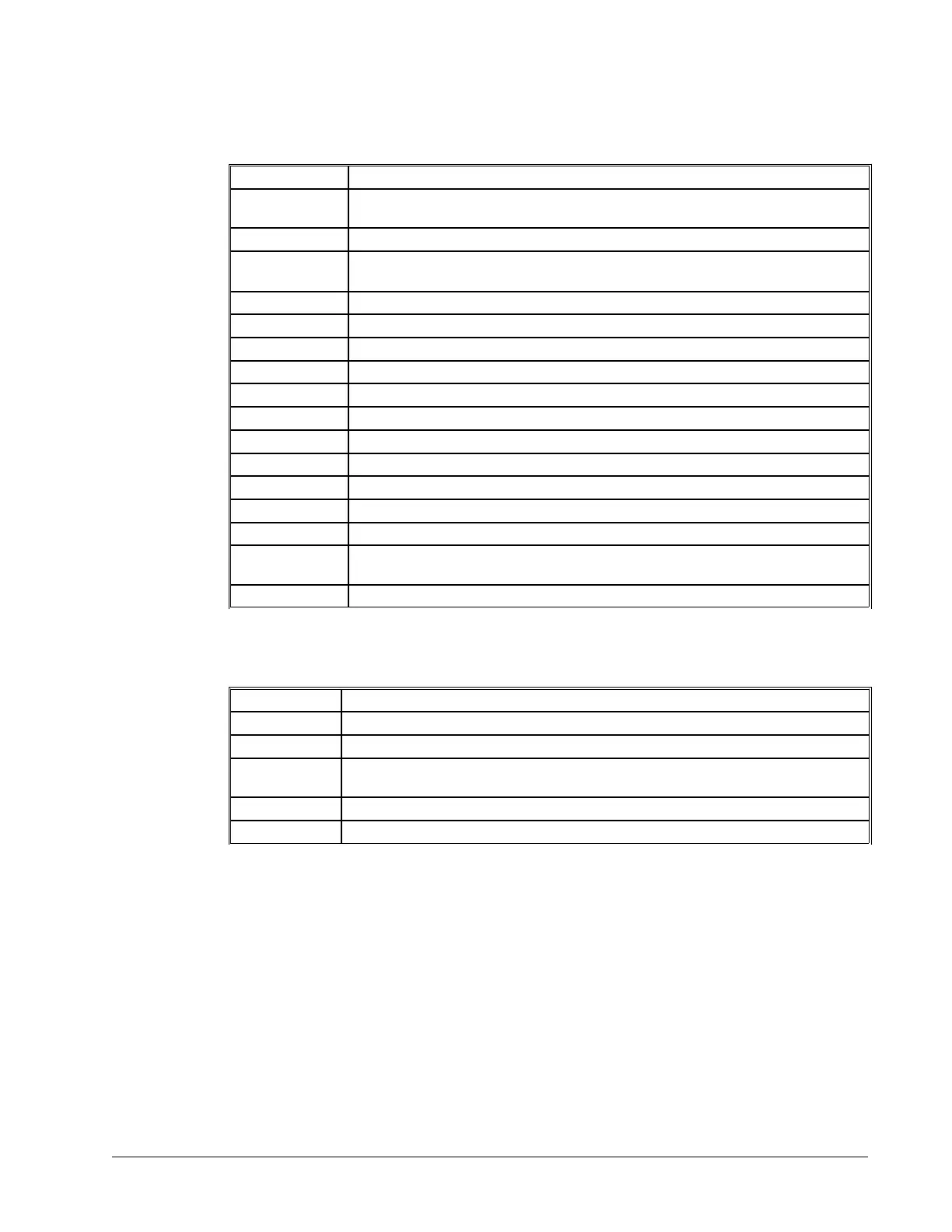
Command Summary - Coordinated Motion Sequence
COMMAND DESCRIPTION.
VM m,n Specifies the axes for the planar motion where m and n represent the planar axes and p is
the tangent axis.
VP m,n Return coordinate of last point, where m=X,Y,Z or W.
CR r,Θ, ±∆Θ Specifies arc segment where r is the radius, Θ is the starting angle and ∆Θ is the travel
angle. Positive direction is CCW.
VS s,t Specify vector speed or feed rate of sequence.
VA s,t Specify vector acceleration along the sequence.
VD s,t Specify vector deceleration along the sequence.
VR s,t Specify vector speed ratio
BGST Begin motion sequence, S or T
CSST Clear sequence, S or T
AV s,t Trippoint for After Relative Vector distance.
AMST Holds execution of next command until Motion Sequence is complete.
TN m,n Tangent scale and offset.
ES m,n Ellipse scale factor.
IT s,t S curve smoothing constant for coordinated moves
LM? Return number of available spaces for linear and circular segments in DMC-40x0
sequence buffer. Zero means buffer is full. 511 means buffer is empty.
CAS or CAT Specifies which coordinate system is to be active (S or T)
Operand Summary - Coordinated Motion Sequence
OPERAND DESCRIPTION
_VPM The absolute coordinate of the axes at the last intersection along the sequence.
_AV Distance traveled.
_LM Number of available spaces for linear and circular segments in DMC-40x0 sequence buffer.
Zero means buffer is full. 511 means buffer is empty.
_CS Segment counter - Number of the segment in the sequence, starting at zero.
_VE Vector length of coordinated move sequence.
When AV is used as an operand, _AV returns the distance traveled along the sequence.
The operands _VPX and _VPY can be used to return the coordinates of the last point specified along the path.
Example:
Traverse the path shown in Fig. 6.8. Feed rate is 20000 counts/sec. Plane of motion is XY
VM XY Specify motion plane
VS 20000 Specify vector speed
VA 1000000 Specify vector acceleration
VD 1000000 Specify vector deceleration
VP -4000,0 Segment AB
CR 1500,270,-180 Segment BC
DMC-40x0 User Manual Chapter 6 Programming Motion • 94