Figure 6.2: Position vs. Time (msec) Motion 1
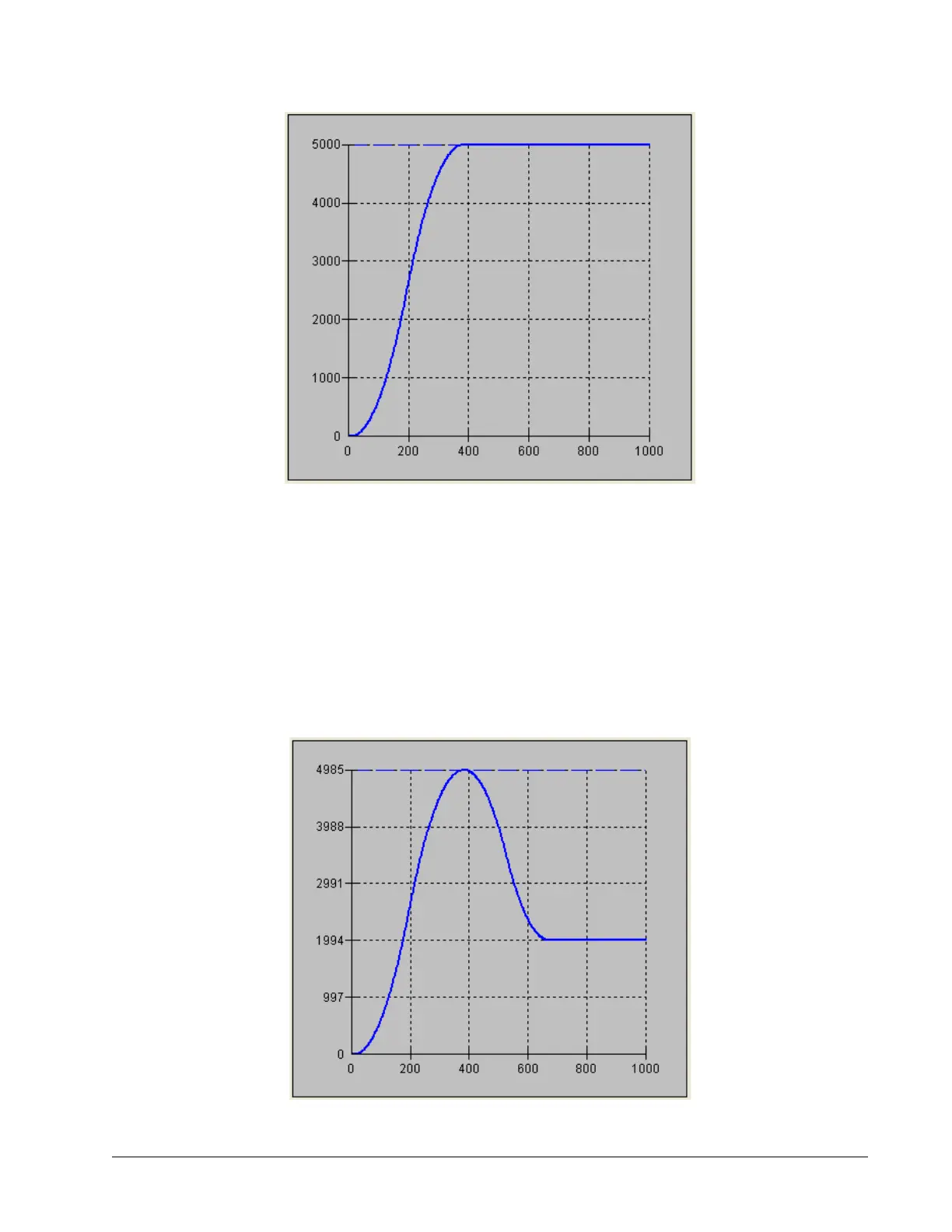
Example - Motion 2:
The previous step showed the plot if the motion continued all the way to 5000, however partway through the motion,
the object that was being tracked changed direction, so the host program determined that the actual target position
should be 2000 cts at that time. Figure 6.2 shows what the position profile would look like if the move was allowed
to complete to 5000 cts. The position was modified when the robot was at a position of 4200 cts. Note that the
robot actually travels to a distance of almost 5000 cts before it turns around. This is a function of the deceleration
rate set by the DC command. When a direction change is commanded, the controller decelerates at the rate specified
by the DC command. The controller then ramps the velocity in up to the value set with SP in the opposite direction
traveling to the new specified absolute position. In Figure 6.3 the velocity profile is triangular because the controller
doesn’t have sufficient time to reach the set speed of 50000 cts/sec before it is commanded to change direction.
Figure 6.3: Position vs. Time (msec) Motion 2
Chapter 6 Programming Motion • 83 DMC-40x0 User Manual