Chapter 6 Programming Motion
Overview
The DMC-40x0 provides several modes of motion, including independent positioning and jogging, coordinated
motion, electronic cam motion, and electronic gearing. Each one of these modes is discussed in the following
sections.
The DMC-4010 are single axis controllers and use X-axis motion only. Likewise, the DMC-4020 use X and Y, the
DMC-4030 use X,Y, and Z, and the DMC-4040 use X,Y,Z, and W. The DMC-4050 use A,B,C,D, and E. The
DMC-4060 use A,B,C,D,E, and F. The DMC-4070 use A,B,C,D,E,F, and G. The DMC-4080 use the axes
A,B,C,D,E,F,G, and H.
The example applications described below will help guide you to the appropriate mode of motion.
For controllers with 5 or more axes, the specifiers, ABCDEFGH, are used. XYZ and W may be
interchanged with ABCD.
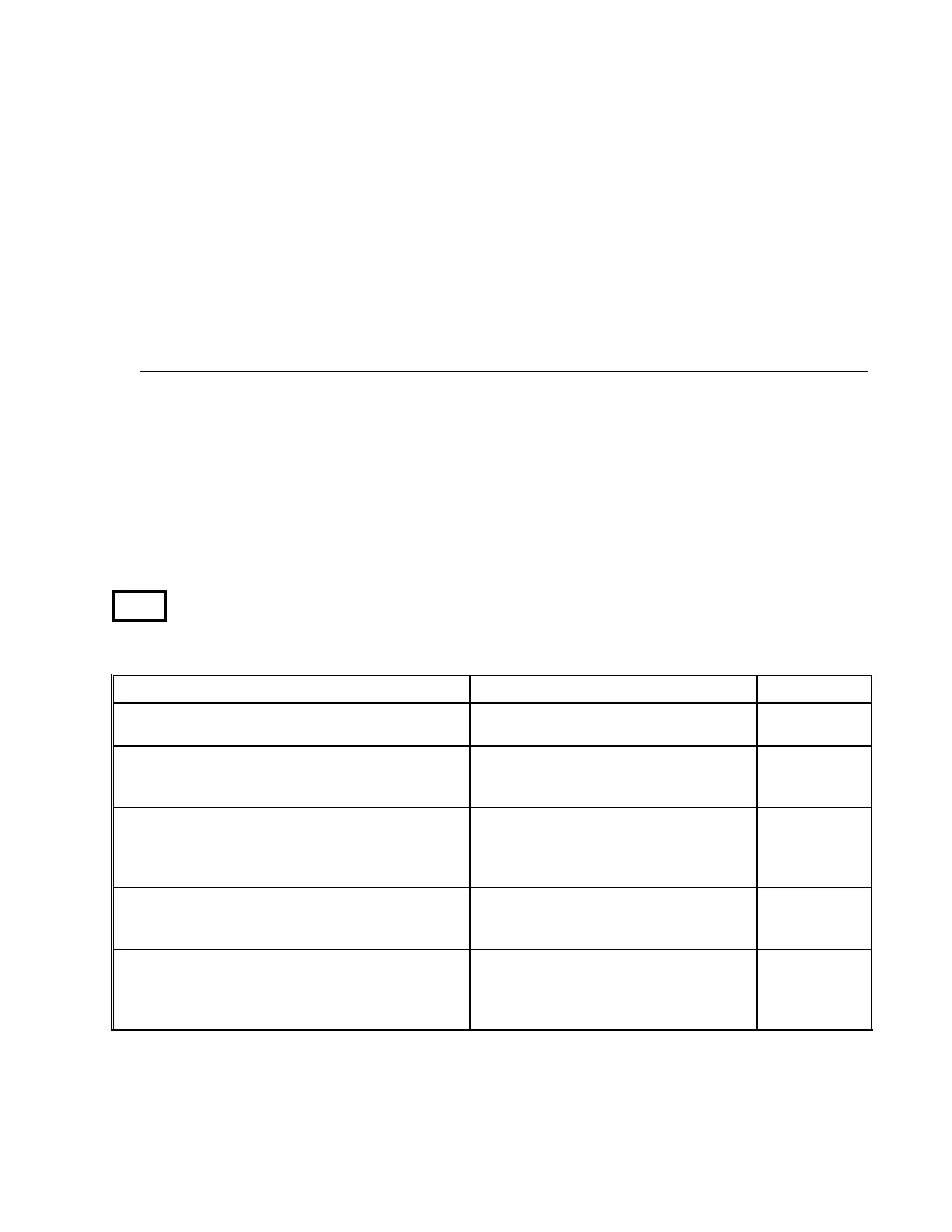
EXAMPLE APPLICATION MODE OF MOTION COMMANDS
Absolute or relative positioning where each axis is
independent and follows prescribed velocity profile.
Independent Axis Positioning PA,PR
SP,AC,DC
Velocity control where no final endpoint is prescribed.
Motion stops on Stop command.
Independent Jogging JG
AC,DC
ST
Absolute positioning mode where absolute position targets
may be sent to the controller while the axis is in motion.
Position Tracking PA,
PT
SP
AC, DC
Motion Path described as incremental position points versus
time.
Contour Mode CM
CD
DT
2,3 or 4 axis coordinated motion where path is described by
linear segments.
Linear Interpolation LM
LI, LE
VS,VR
VA,VD
DMC-40x0 User Manual Chapter 6 Programming Motion • 76