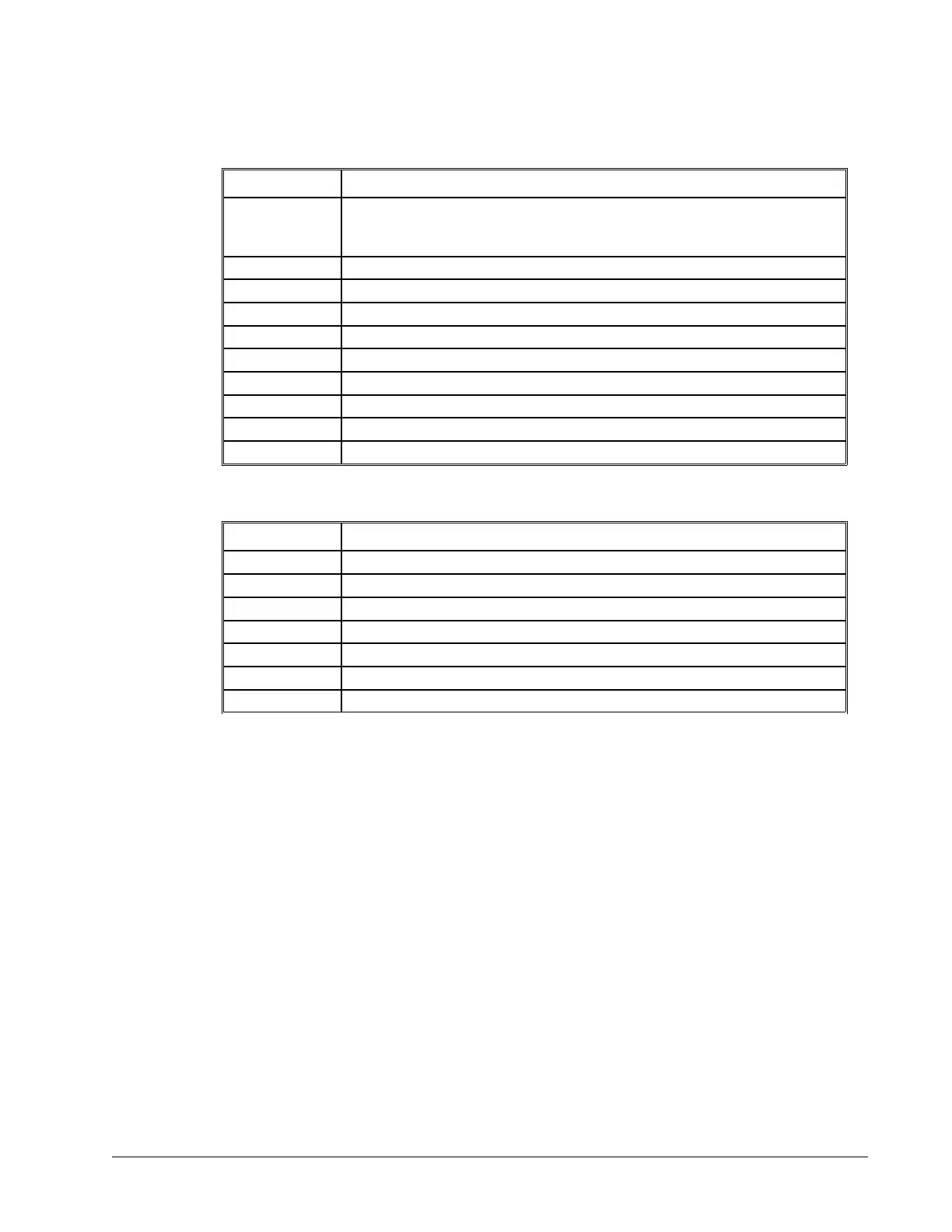
Command Summary - Electronic CAM
Command Description
EA p Specifies master axes for electronic cam where:
p = X,Y,Z or W or A,B,C,D,E,F,G,H for main encoder as master or M or N a for virtual
axis master
EB n Enables the ECAM
EC n ECAM counter - sets the index into the ECAM table
EG x,y,z,w Engages ECAM
EM x,y,z,w Specifies the change in position for each axis of the CAM cycle
EP m,n Defines CAM table entry size and offset
EQ m,n Disengages ECAM at specified position
ET[n] Defines the ECAM table entries
EW Widen Segment (see Application Note #2444)
EY Set ECAM cycle count
Operand Summary - Electronic CAM
Command Description
_EB Contains State of ECAM
_EC Contains current ECAM index
_EGx Contains ECAM status for each axis
_EM Contains size of cycle for each axis
_EP Contains value of the ECAM table interval
_EQx Contains ECAM status for each axis
_EY Set ECAM cycle count
Example - Electronic CAM
The following example illustrates a cam program with a master axis, Z, and two slaves, X and Y.
INSTRUCTION INTERPRETATION
#A;V1=0 Label; Initialize variable
PA 0,0;BGXY;AMXY Go to position 0,0 on X and Y axes
EA Z Z axis as the Master for ECAM
EM 0,0,4000 Change for Z is 4000, zero for X, Y
EP400,0 ECAM interval is 400 counts with zero start
ET[0]=0,0 When master is at 0 position; 1
st
point.
ET[1]=40,20 2
nd
point in the ECAM table
ET[2]=120,60 3
rd
point in the ECAM table
ET[3]=240,120 4
th
point in the ECAM table
ET[4]=280,140 5
th
point in the ECAM table
ET[5]=280,140 6
th
point in the ECAM table
ET[6]=280,140 7
th
point in the ECAM table
ET[7]=240,120 8
th
point in the ECAM table
ET[8]=120,60 9
th
point in the ECAM table
Chapter 6 Programming Motion • 103 DMC-40x0 User Manual