Auto-Start Routine
The DMC-40x0 has a special label for automatic program execution. A program which has been saved into the
controller’s non-volatile memory can be automatically executed upon power up or reset by beginning the program
with the label #AUTO. The program must be saved into non-volatile memory using the command, BP.
Automatic Subroutines for Monitoring Conditions
Often it is desirable to monitor certain conditions continuously without tying up the host or DMC-40x0 program
sequences. The controller can monitor several important conditions in the background. These conditions include
checking for the occurrence of a limit switch, a defined input, position error, or a command error. Automatic
monitoring is enabled by inserting a special, predefined label in the applications program. The pre-defined labels
are:
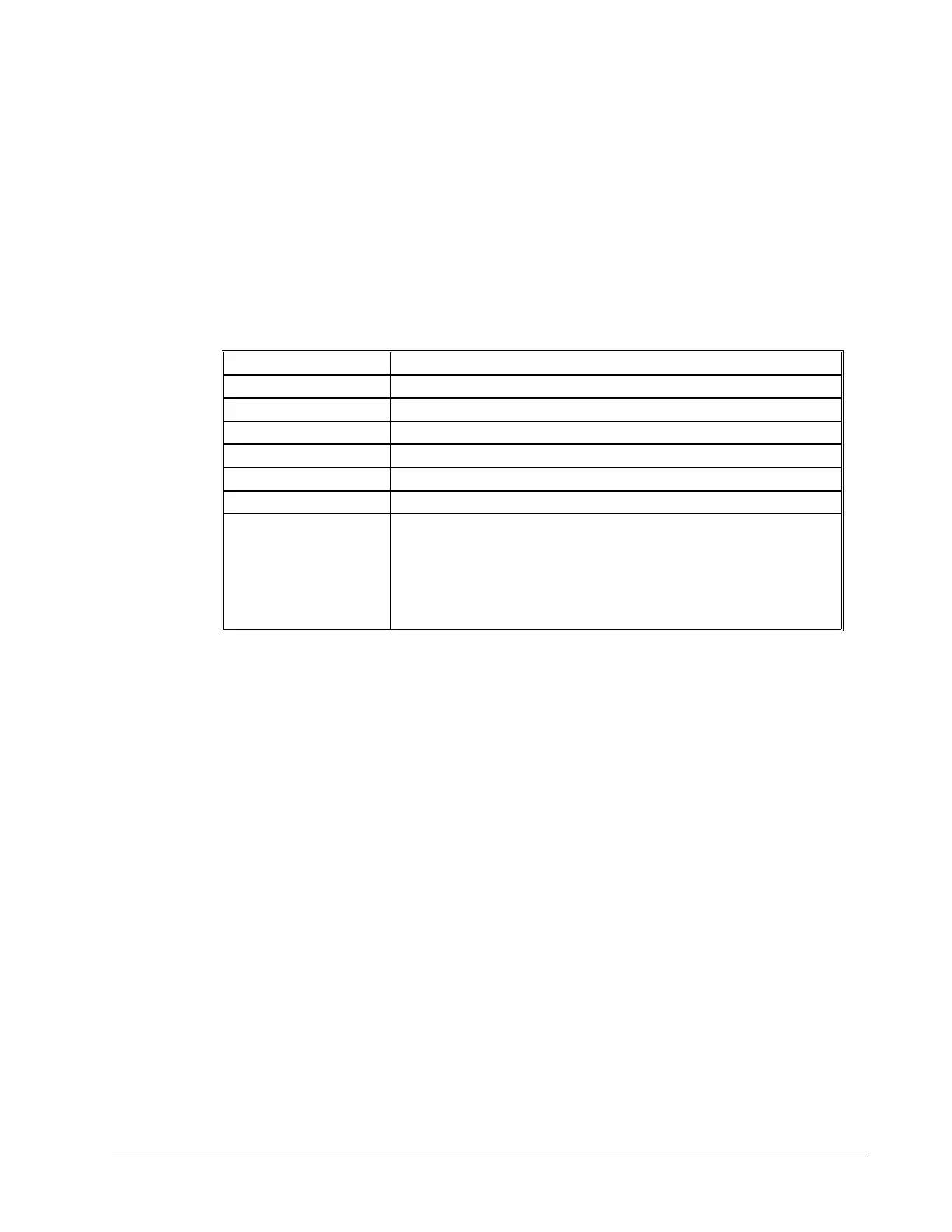
SUBROUTINE DESCRIPTION
#LIMSWI
Limit switch on any axis goes low
#ININT
Input specified by II goes low
#POSERR
Position error exceeds limit specified by ER
#MCTIME
Motion Complete timeout occurred. Timeout period set by TW command
#CMDERR
Bad command given
#AUTO
Automatically executes on power up
#AUTOERR
Automatically executes when a checksum is encountered during #AUTO
start-up. Check error condition with _RS.
bit 0 for variable checksum error
bit 1 for parameter checksum error
bit 2 for program checksum error
bit 3 for master reset error (there should be no program )
For example, the #POSERR subroutine will automatically be executed when any axis exceeds its position error
limit. The commands in the #POSERR subroutine could decode which axis is in error and take the appropriate
action. In another example, the #ININT label could be used to designate an input interrupt subroutine. When the
specified input occurs, the program will be executed automatically.
NOTE: An application program must be running for #CMDERR to function.
Example - Limit Switch:
This program prints a message upon the occurrence of a limit switch. Note, for the #LIMSWI routine to function,
the DMC-40x0 must be executing an applications program from memory. This can be a very simple program that
does nothing but loop on a statement, such as #LOOP;JP #LOOP;EN. Motion commands, such as JG 5000 can still
be sent from the PC even while the “dummy” applications program is being executed.
:ED Edit Mode
000 #LOOP Dummy Program
001 JP #LOOP;EN Jump to Loop
002 #LIMSWI Limit Switch Label
003 MG “LIMIT OCCURRED”
Print Message
004 RE Return to main program
<control> Q Quit Edit Mode
:XQ #LOOP Execute Dummy Program
:JG 5000 Jog
:BGX Begin Motion
Chapter 7 Application Programming • 143 DMC-40x0 User Manual