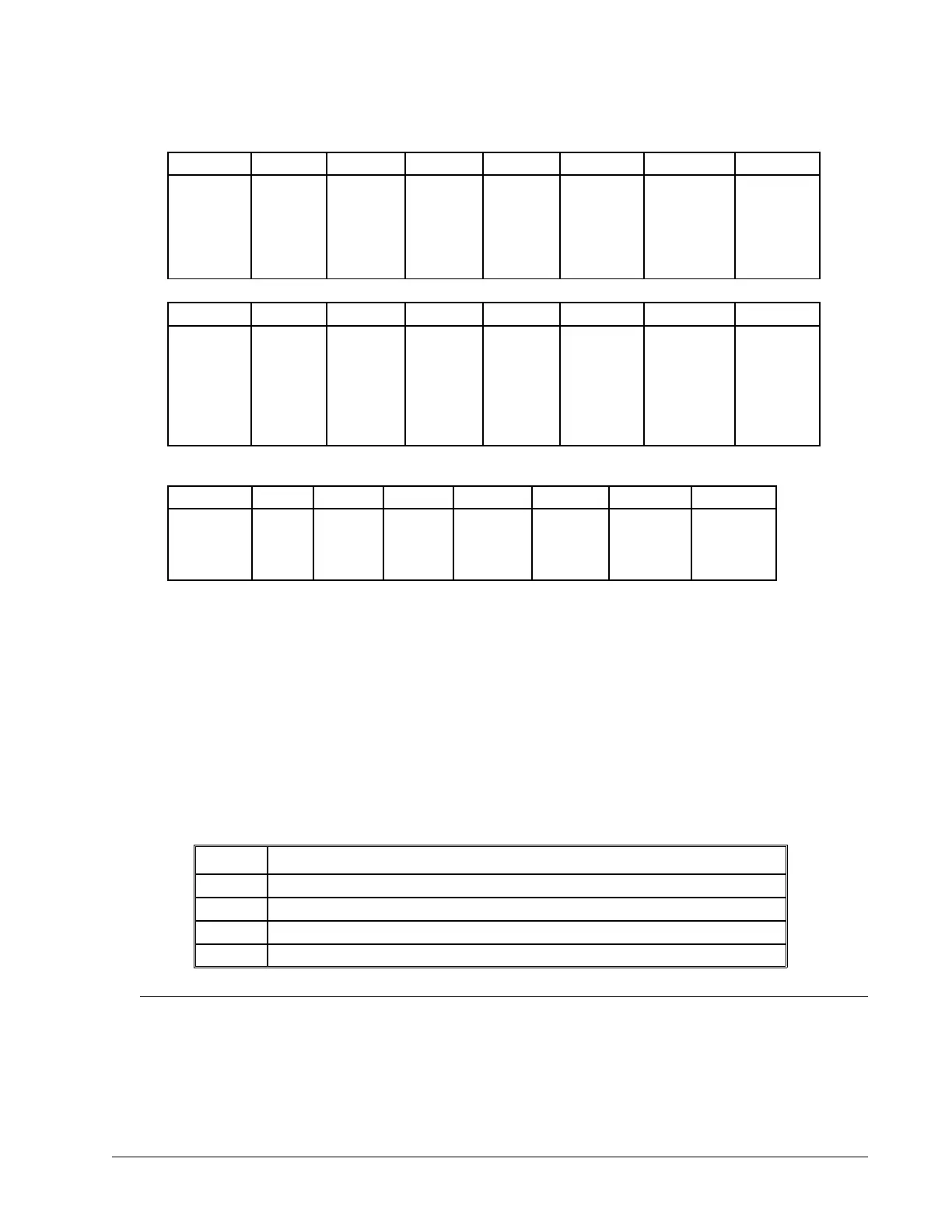
Axis Status (1 Word)
BIT 15 BIT 14 BIT 13 BIT 12 BIT 11 BIT 10 BIT 9 BIT 8
Move in
Progress
Mode of
Motion
PA or
PR
Mode of
Motion
PA only
(FE)
Find
Edge in
Progress
Home
(HM) in
Progress
1
st
Phase
of HM
complete
2
nd
Phase
of HM
complete
or FI
command
issued
Mode of
Motion
Coord.
Motion
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
Negative
Direction
Move
Mode of
Motion
Contour
Motion
is
slewing
Motion
is
stopping
due to
ST of
Limit
Switch
Motion
is
making
final
decel.
Latch is
armed
3rd Phase
of HM in
Progress
Motor
Off
Axis Switches (1 Byte)
BIT 7 BIT 6 BIT 5 BIT 4 BIT 3 BIT 2 BIT 1 BIT 0
Latch
Occurred
State
of
Latch
Input
N/A N/A State of
Forward
Limit
State of
Reverse
Limit
State of
Home
Input
Stepper
Mode
Notes Regarding Velocity and Torque Information
The velocity information that is returned in the data record is 64 times larger than the value returned when using the
command TV (Tell Velocity). See command reference for more information about TV.
The Torque information is represented as a number in the range of +/-32767. Maximum negative torque is -32767.
Maximum positive torque is 32767. Zero torque is 0.
QZ Command
The QZ command can be very useful when using the QR command, since it provides information about the
controller and the data record. The QZ command returns the following 4 bytes of information.
BYTE # INFORMATION
0 Number of axes present
1 number of bytes in general block of data record
2 number of bytes in coordinate plane block of data record
3 Number of Bytes in each axis block of data record
Controller Response to Commands
Most DMC-40x0 instructions are represented by two characters followed by the appropriate parameters. Each
instruction must be terminated by a carriage return or semicolon.
Chapter 4 Software Tools and Communication • 61 DMC-40x0 User Manual