The DMC-40x0 provides several event triggers that cause the program sequencer to halt until the specified event
occurs. Normally, a program is automatically executed sequentially one line at a time. When an event trigger
instruction is decoded, however, the actual program sequence is halted. The program sequence does not continue
until the event trigger is “tripped”. For example, the motion complete trigger can be used to separate two move
sequences in a program. The commands for the second move sequence will not be executed until the motion is
complete on the first motion sequence. In this way, the controller can make decisions based on its own status or
external events without intervention from a host computer.
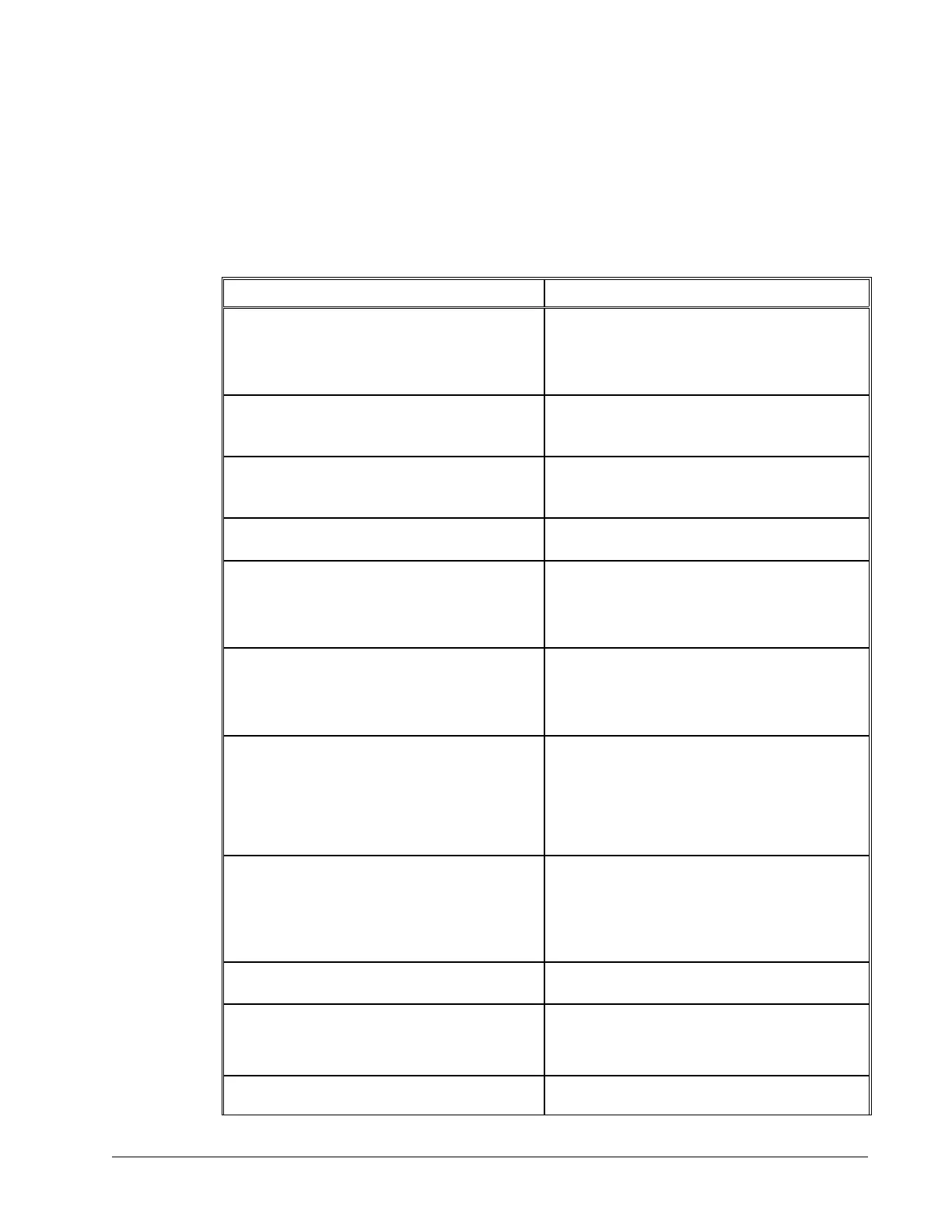
DMC-40x0 Event Triggers
Command Function
AM X Y Z W or S
(A B C D E F G H)
Halts program execution until motion is complete on
the specified axes or motion sequence(s). AM with no
parameter tests for motion complete on all axes. This
command is useful for separating motion sequences in a
program.
AD X or Y or Z or W
(A or B or C or D or E or F or G or H)
Halts program execution until position command has
reached the specified relative distance from the start of
the move. Only one axis may be specified at a time.
AR X or Y or Z or W
(A or B or C or D or E or F or G or H)
Halts program execution until after specified distance
from the last AR or AD command has elapsed. Only
one axis may be specified at a time.
AP X or Y or Z or W
(A or B or C or D or E or F or G or H)
Halts program execution until after absolute position
occurs. Only one axis may be specified at a time.
MF X or Y or Z or W
(A or B or C or D or E or F or G or H)
Halt program execution until after forward motion
reached absolute position. Only one axis may be
specified. If position is already past the point, then MF
will trip immediately. Will function on geared axis or
aux. inputs.
MR X or Y or Z or W
(A or B or C or D or E or F or G or H)
Halt program execution until after reverse motion
reached absolute position. Only one axis may be
specified. If position is already past the point, then
MR will trip immediately. Will function on geared axis
or aux. inputs.
MC X or Y or Z or W
(A or B or C or D or E or F or G or H)
Halt program execution until after the motion profile
has been completed and the encoder has entered or
passed the specified position. TW x,y,z,w sets timeout
to declare an error if not in position. If timeout occurs,
then the trippoint will clear and the stop code will be
set to 99. An application program will jump to label
#MCTIME.
AI +/- n Halts program execution until after specified input is at
specified logic level. n specifies input line. Positive is
high logic level, negative is low level. n=1 through 8
for DMC-4010, 4020, 4030, 4040. n=1 through 16 for
DMC-4050, 4060, 4070, 4080
Also n= 17-48
AS X Y Z W S
(A B C D E F G H)
Halts program execution until specified axis has
reached its slew speed.
AT +/-n Halts program execution until n msec from reference
time. AT 0 sets reference. AT n waits n msec from
reference. AT -n waits n msec from reference and sets
new reference after elapsed time.
AV n Halts program execution until specified distance along
a coordinated path has occurred.
DMC-40x0 User Manual Chapter 7 Application Programming • 136