190
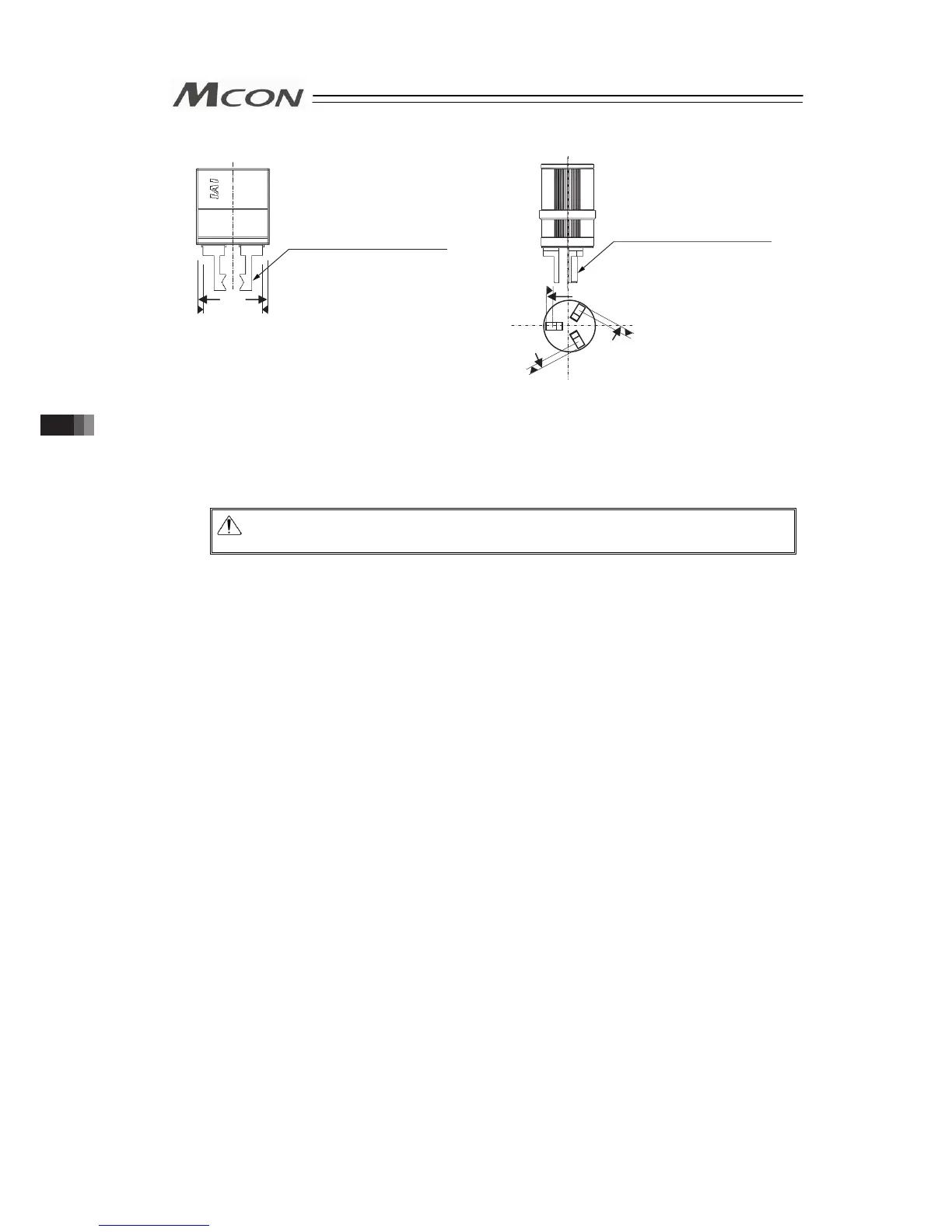
[For Gripper]
+
+
+
1)
2) 2)
Finger Attachment
(Note)
Finger Attachment
(Note)
1)
2)
1)
2)
1)
2)
1) The actuator moves toward the mechanical end (to end side) at the home return speed
(20mm/s).
2) The actuator is turned at the mechanical end and stopped at the home position. The
amount of movement at this time is that set in Parameter No.22 “Home Return Offset
Level” after Z-phase is detected.
Caution: Make sure to refer to Section 8.2 [14] when a change to Parameter No.22
“Home Return Offset Level” is required.
Note) Finger attachment is
not included in the
actuator package.
Please prepare
separately.
3.8 Control and functions of Input and output signals of Remote I/O Mode

 Loading...
Loading...








