288
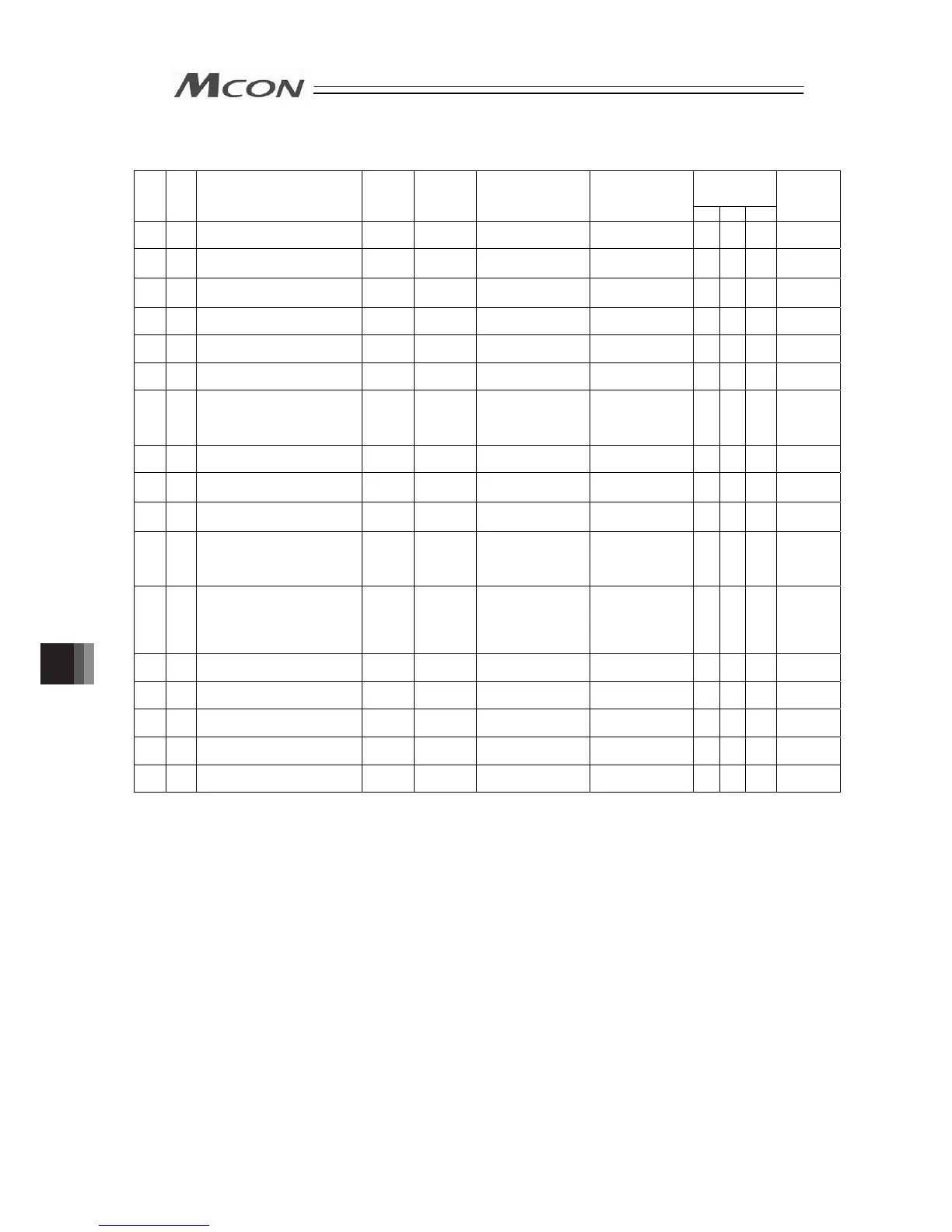
Parameter List (5/5)
Applicable
Motor Type
(Note 3)
No.
Category
Name Symbol Unit
(Note 1)
Input Range
Default factory
setting
A P D
Relevant
sections
144 B
Gain Scheduling Upper Limit
Multiplying Ratio
GSUL % 0 to 1023 0 (Disabled) - ○ - 8.2 [58]
145 C
GS Velocity Loop
Proportional Gain
GSPC - 1 to 30000
In accordance with
actuator
(Note 2)
-
○ -
8.2 [59]
8.2 [23]
146 C
GS Velocity Loop Integral
Gain
GSIC - 1 to 500000
In accordance with
actuator
(Note 2)
-
○ -
8.2 [60]
8.2 [24]
147 B
Total Movement Count
Threshold
TMCT Times 0 to 999999999 0 (Disabled) ○ ○ ○ 8.2 [61]
148 B
Total Operated Distance
Threshold
ODOT m 0 to 999999999 0 (Disabled) ○ ○ ○ 8.2 [62]
149 B Zone Output Changeover ZONE -
0: Not to change
1: To change
0 ○ ○ ○ 8.2 [63]
151 B
Light Malfunction Alarm
Output Select
FSTP -
0: Overload
warning output
1: Message lebel
alarm output
1 ○ ○ ○ 8.2 [64]
152 B High Output Setting BUEN -
0: Disabled
1: Enabled
In accordance
with actuator
(Note 2)
-
○ - 8.2 [65]
153 B
BU Velocity Loop Proportional
Gain
BUPC - 1 to 10000
In accordance with
actuator
(Note 2)
-
○ -
8.2 [66]
8.2 [23]
154 B
BU Velocity Loop Integral
Gain
BUIC - 1 to 100000
In accordance with
actuator
(Note 2)
-
○ -
8.2 [67]
8.2 [24]
155 A
Absolute Battery Retention
Time
AIP -
0: 20 days
1: 15 days
2: 10 days
3: 5 days
0 ○ ○ -
8.2 [68]
7.2.2
156 B
Torque Check/Light
Malfunction Output Select
SLAL -
0: Torque check
effective
1: Light
malfunction
effective
0 - ○ - 8.2 [69]
158 B Valid Axis
/
Invalid Axis Select EFCT -
0: Enabled
1: Disabled
0
○ ○ ○ 8.2 [70]
166 B
Startup Current Limit
Extension Feature
DCET -
0: Disabled
1: Enabled
In accordance
with actuator
(Note 2)
-
○ - 8.2 [71]
168 B Collision Detection Feature CODT - 0 to 7 0 - ○ -
8.2 [72]
5.2
181 B Pressing Method SPOS
0: CON type
1: SEP type
0 ○ ○ ○ 8.2 [73]
182 B Auto Current Adj. Select ACDS
0: Disabled
1: Enabled
0 - ○ -
8.2 [74]
6.2
Note 1 The unit [deg] is for rotary actuator and lever type gripper. It is displayed in [mm] in the teaching tools.
Note 2 The setting values vary in accordance with the specification of the actuator. At shipment, the
parameters are set in accordance with the specification.
Note 3
A: Servo motor type, P: Pulse motor type, D: Brushless DC Motor
Chapter 8 Parameter

 Loading...
Loading...








